【2026 机器人模块大赛】+基于MPS的智能家居六能交互机器人+原理图设计1
一、查手册确定模块原理图
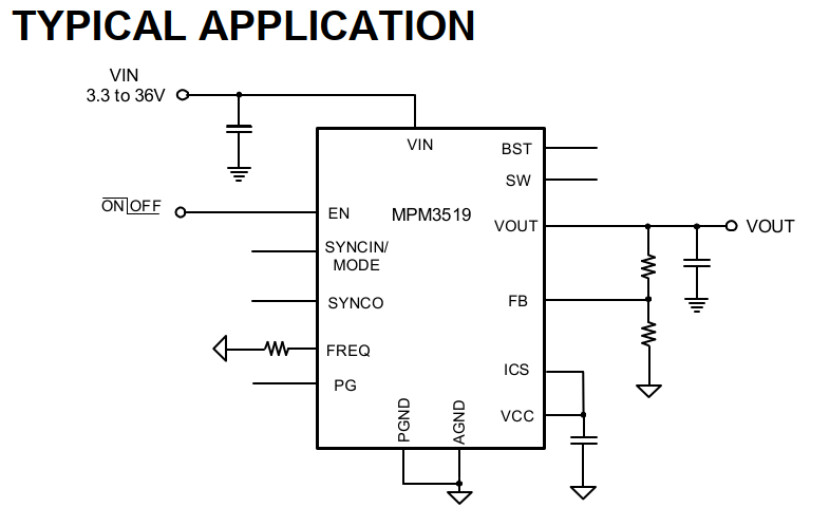
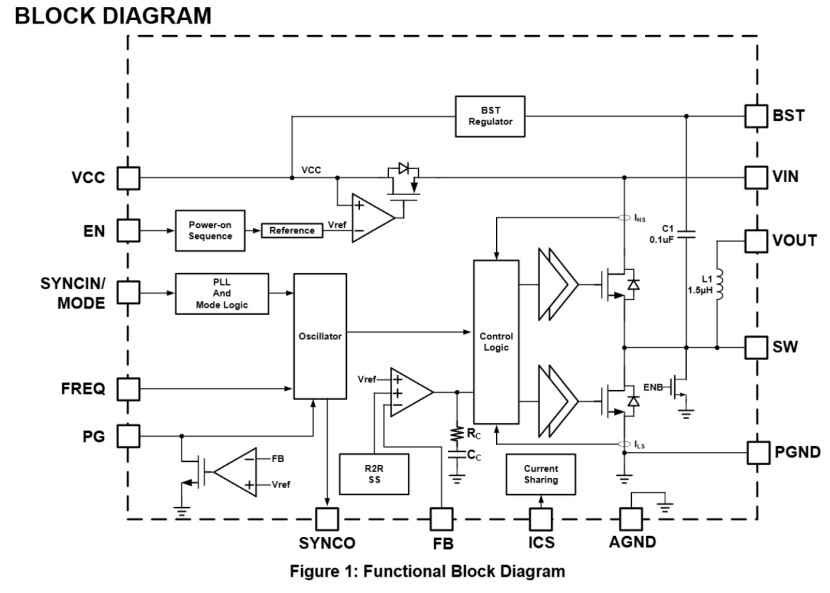
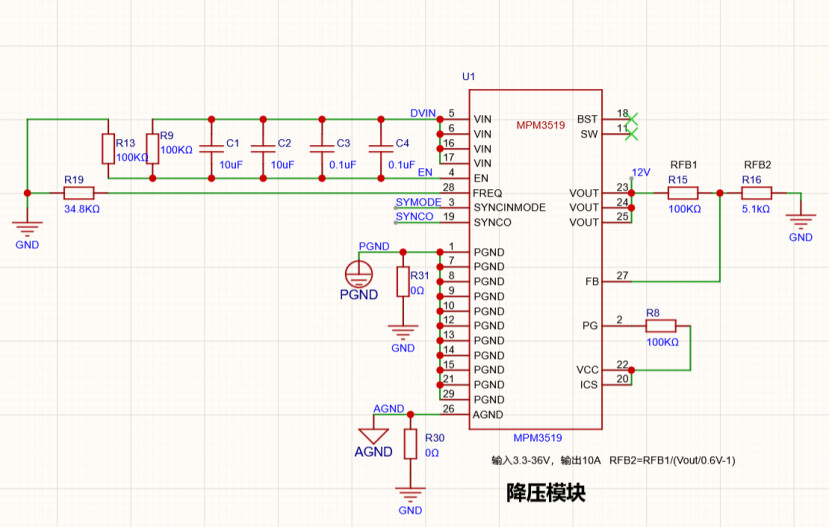
1、MPM3519电源模块
初步计划3S电源作为供电,通过MPM3519进行降压稳定输出12V、3.3V等,整理官方设计相关信息如下:
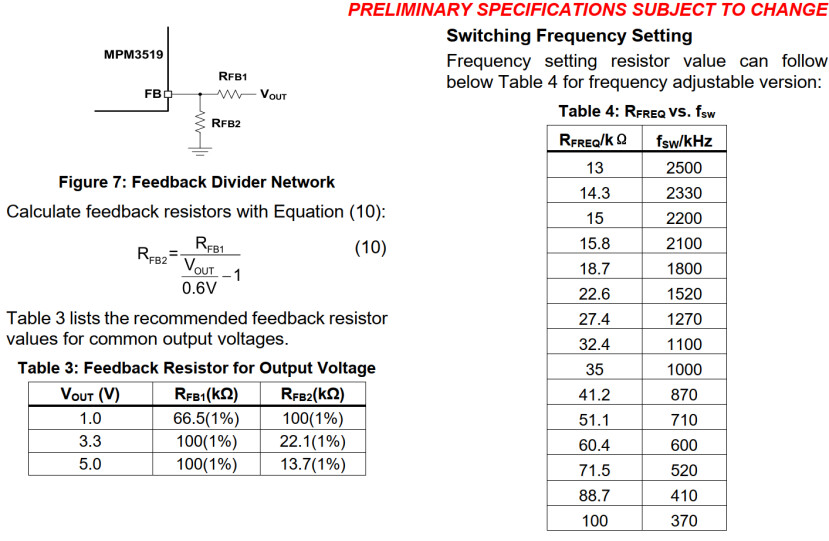
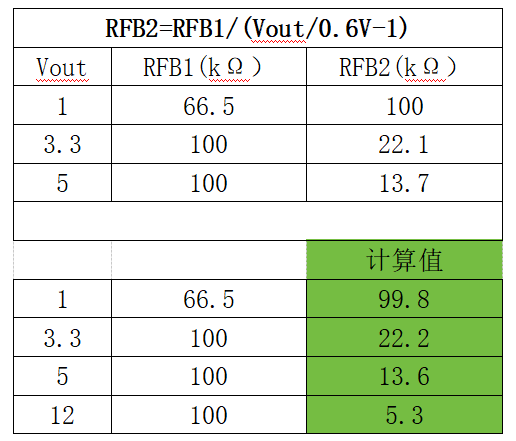
(1)反馈电阻选择
【输出3.3V】直接使用官方推荐的RFB1选100K,RFB2选22.1K
【输出12V】根据官方给的计算公式,RFB1选100K,则测算RFB2应为5.3k,603封装1%精度的贴片电阻常用的有5.1k最接近计算值5.3,所以选择5.1k的
(2)设置频率电阻选择
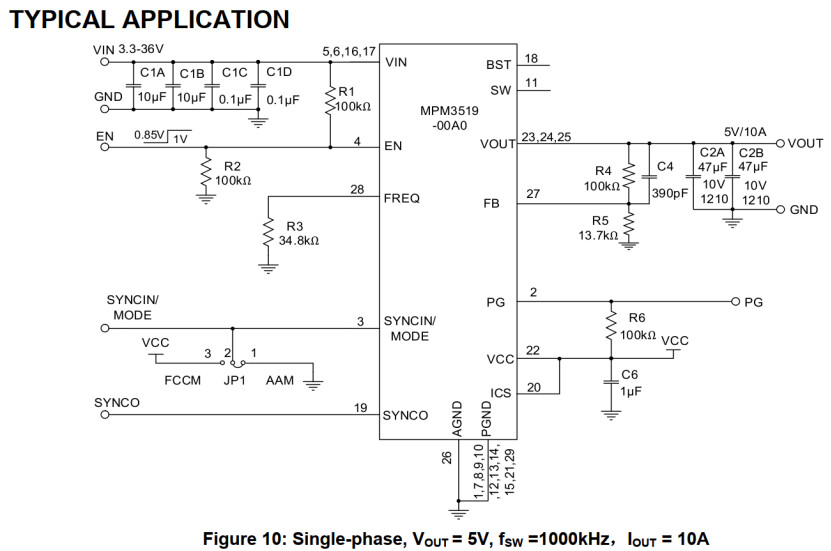
选用1000kHz频率,对应35k,直接使用官方推荐的34.8k
初步设计原理图(12V输出)如下:
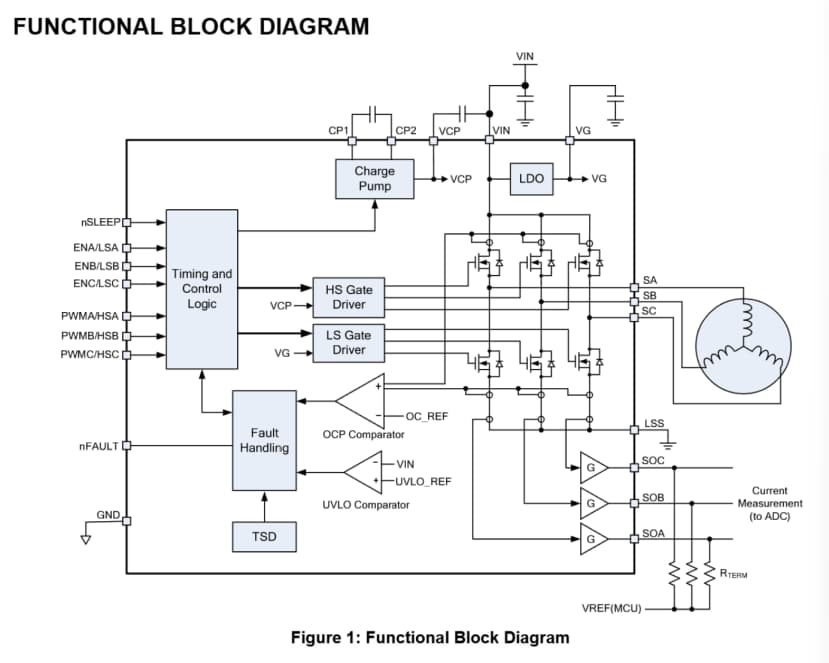
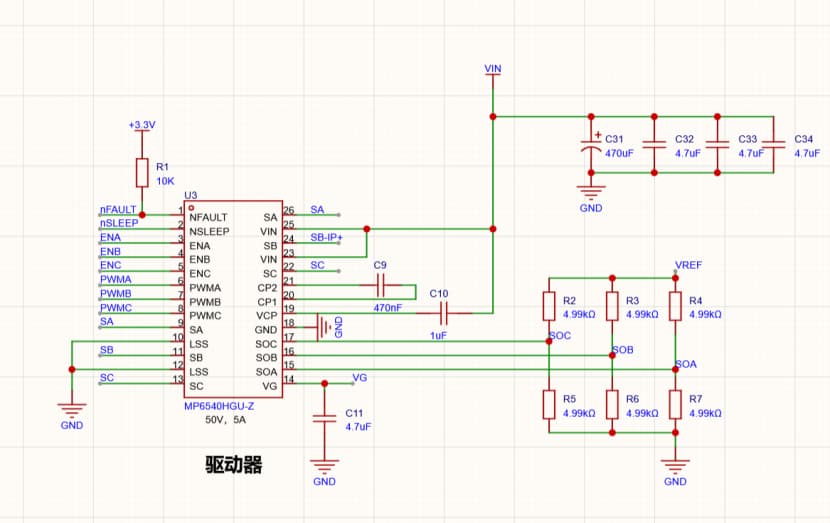
2、MP6540H驱动模块
整理官方设计相关信息如下:
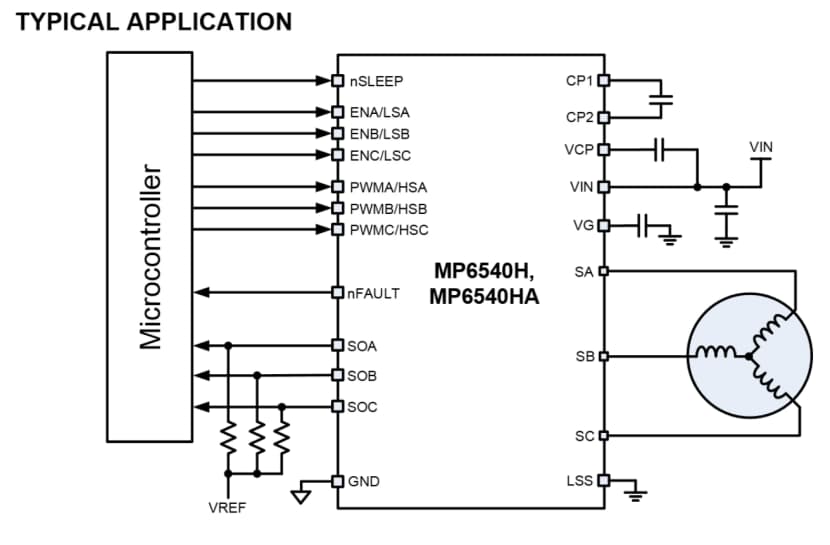
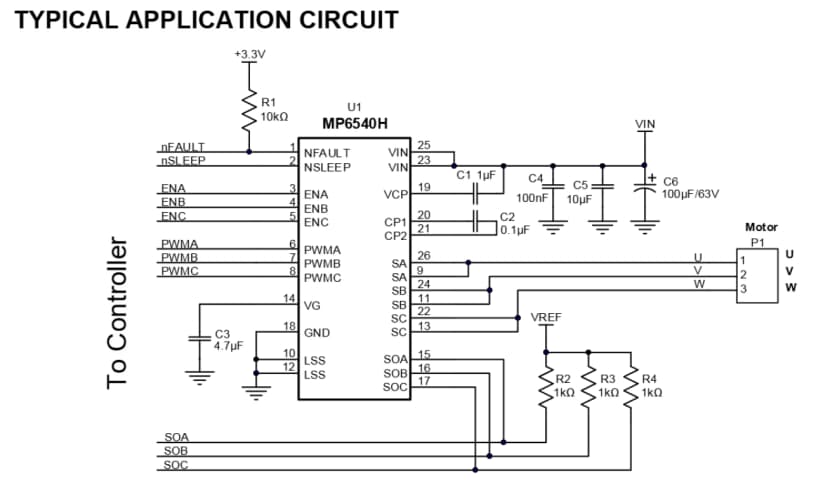
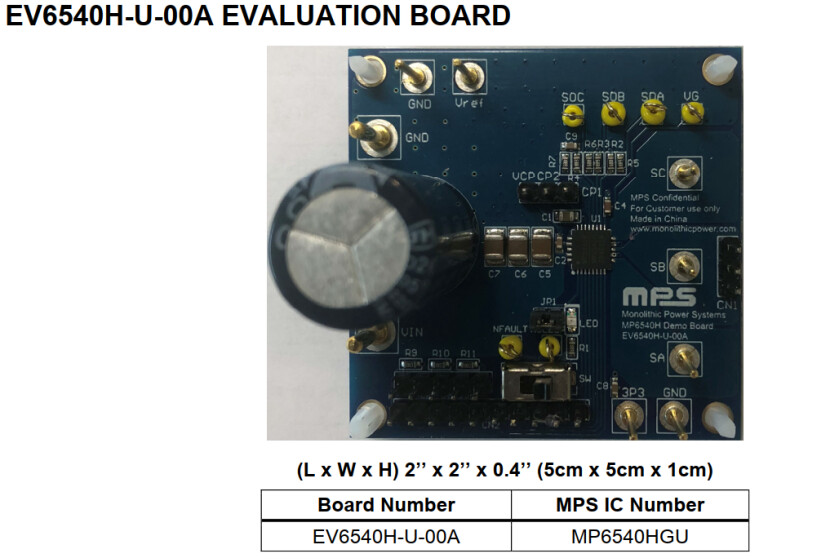
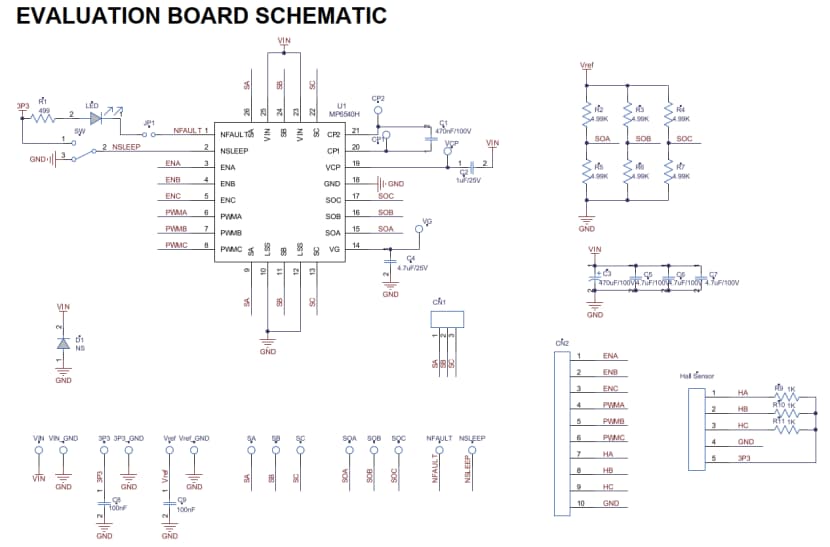
其中SOA、SOB、SOC采样电阻芯片手册选的是1k,另一个基于MP6540H的官方板子选的4.99k,我也选4.99k,初步设计原理图如下:
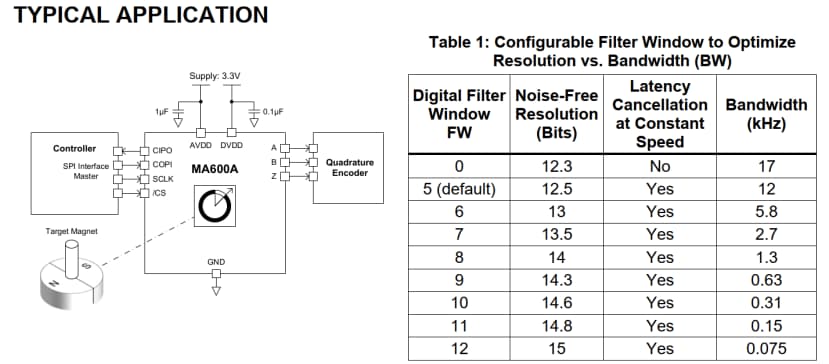
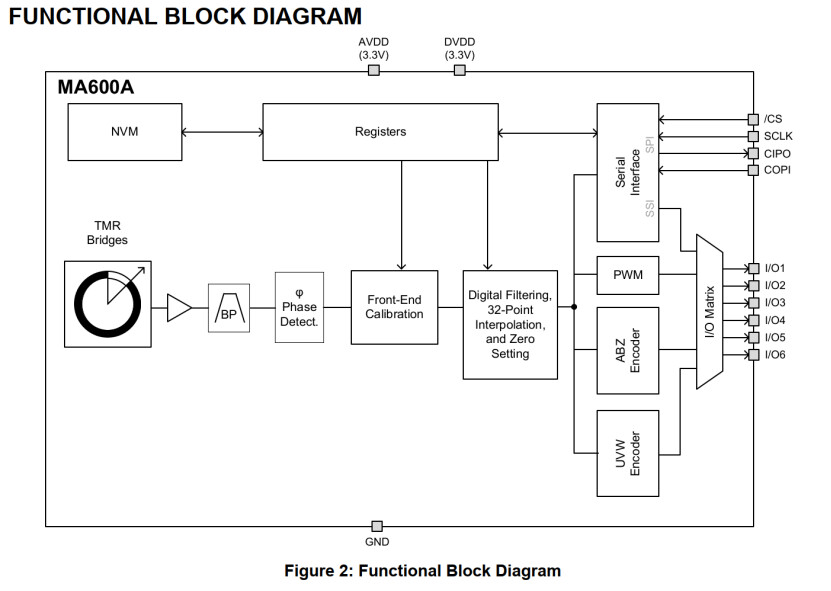
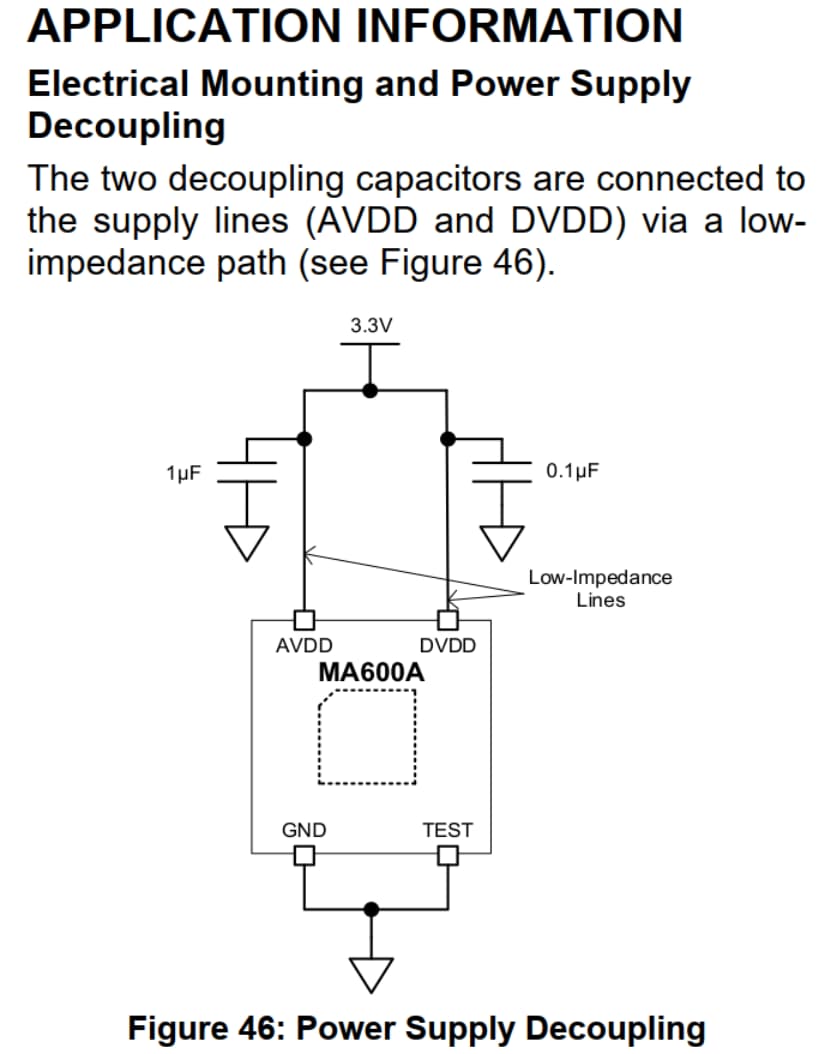
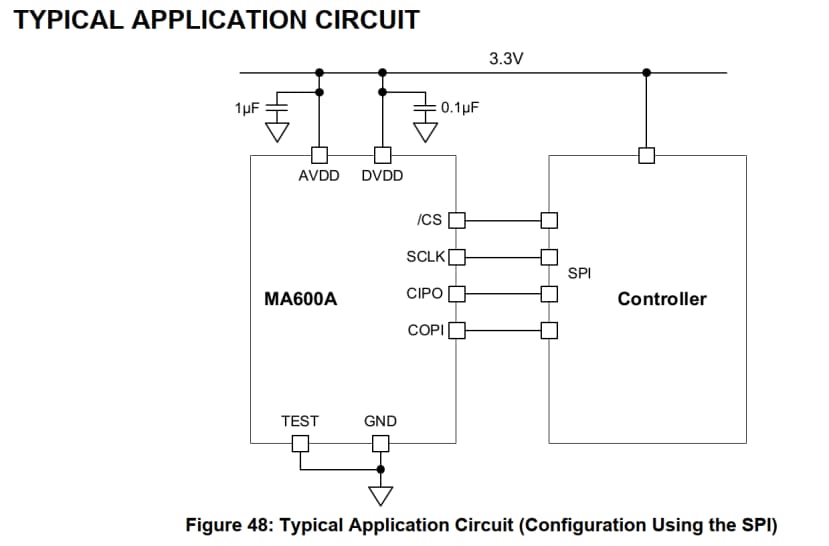
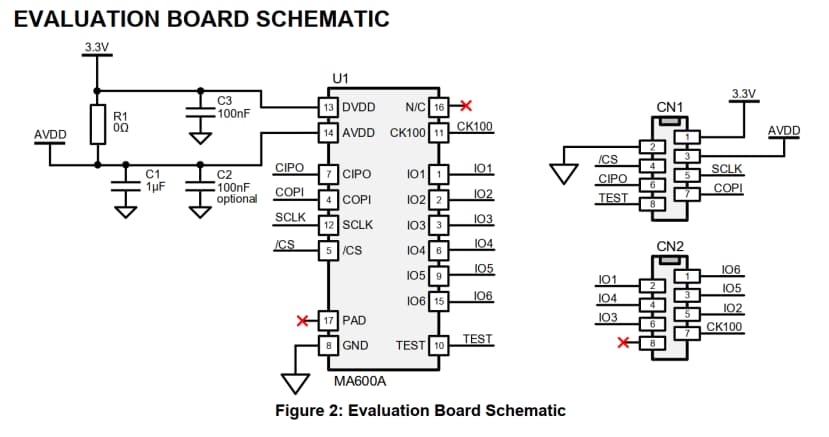
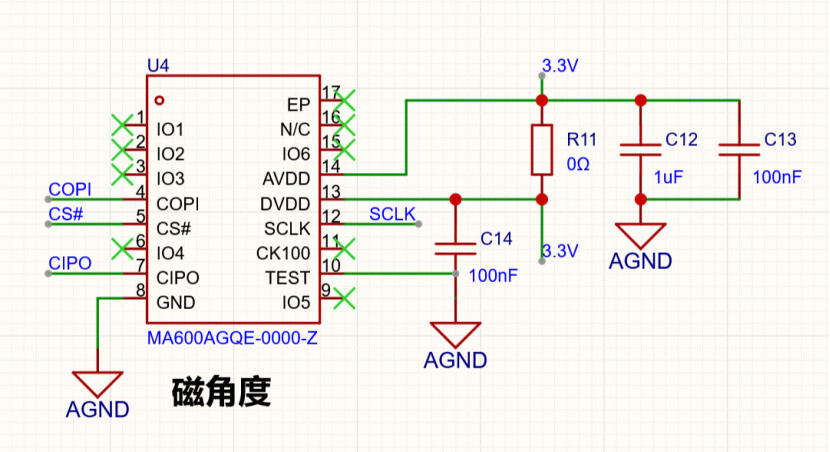
3、MA600A 磁编码位置反馈模块
整理官方设计相关信息如下:
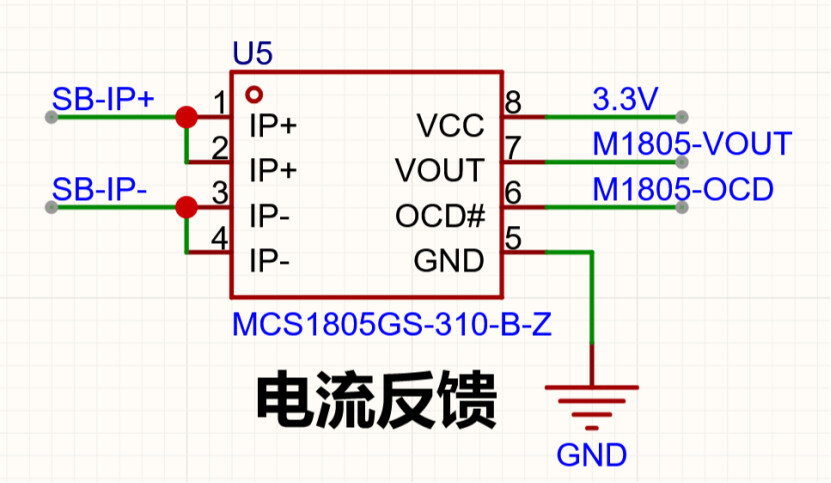
4、MCS1805电流反馈模块
整理官方设计相关信息如下:
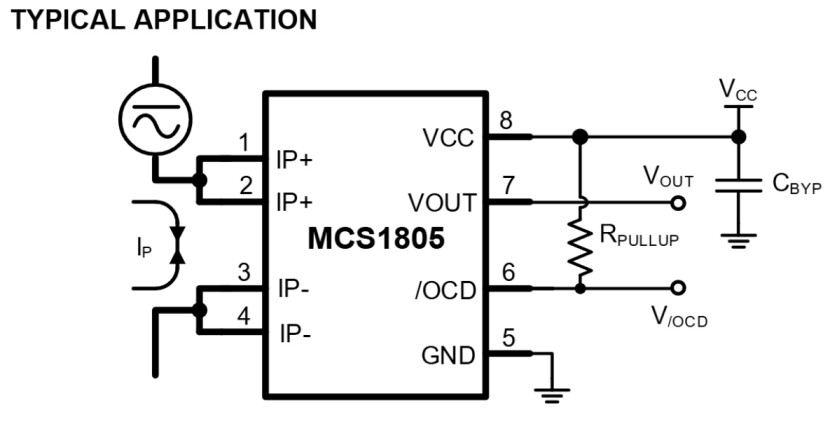
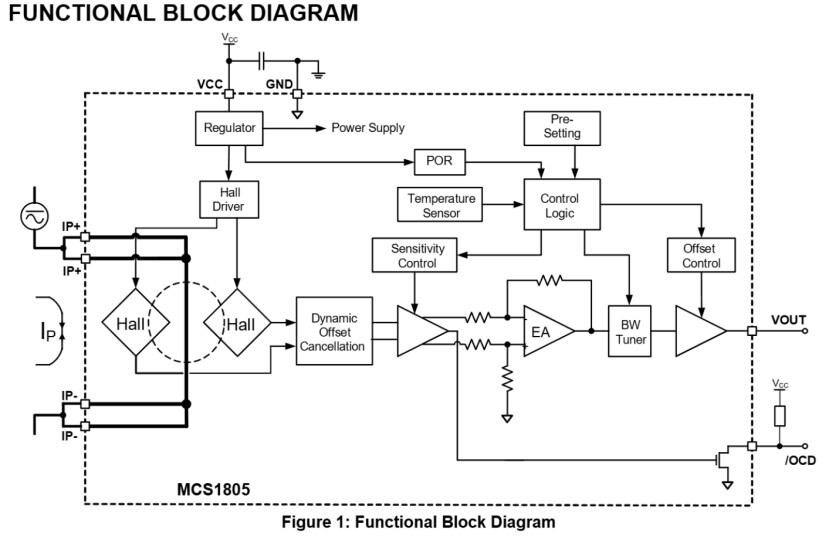
MCS1805模块根据手册介绍,我的初步设计原理图如下:
二、总结
经过几天的折腾,也查了不少资料,咨询了一些坛友,终于完成了上面的初步原理图设计,不过毕竟我还是0经验的小白,这是我第二次画原理图、PCB,第一次是为了维修板子对着实物画了一次,所以不知道是否存在问题,还请大佬进行指点迷津,先谢谢了!
三、下一步计划
我在考虑是选用手头现成的MCU开发板,还是重新设计MCU集成在PCB上,比如选择STM32G474RET6做为主控。
作为小白的我没有一点PCB设计经验,怕带MCU的PCB会出各种EMC设计缺陷,根本用不了,是不是先从简单的开始做,比如先不集成MCU功能,先把驱动和反馈部分做在一块PCB上,再或者驱动、反馈部分也单独做,有没有大佬指点一下,对于纯小白应该怎样选好一点,给点建议!