• 需求确定:针对公园、酒店、小区绿化等具有大型草坪的地点,开发草坪修整机器人,解决长时间无人管理造成的草坪杂乱问题,利用太阳能充电的机器人进行自动化的修整与管理,节省人力人本,优化环境管理。
家用扫拖机器人已经成熟在市场上销售较长时间,可以根据其用途,进一步开发成草坪修整机器人。白天/晴天,利用太阳能为草坪修整机器人充电;夜间无人时,草坪修整机器人进行巡逻式修剪草坪。
• 方案确定:(预计一周)初步方案设定——具备太阳能充电的锂电池系统,为草坪修整机器人提供动力,同时预留备用的市电快速充电接口,运动装置采用直流有刷电机及其驱动器带动滚轮的移动系统,草坪修剪系统由无刷电机及其驱动器提供动力。
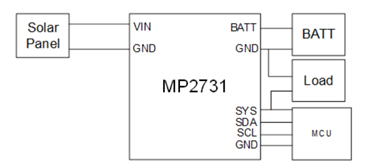
锂电池系统——基于MPS的MP2731并配合控制器开发,适用于中小型太阳能充电解决方案。MP2731集成了VIN连接开关、ADC和电压/电流采样电路,因而显著降低了系统成本。系统设计采用扰动观察(P&O)最大功率点追踪算法,可以实现98%或更高的追踪精度。系统框图如下:
移动系统——基于MPS的MP6527并配合控制器开发,适用于需要大启动扭矩,多路运动驱动的解决方案。在草坪上移动需要的动力来源多,启动动力大。MP6527带串行输入控制的 40V、0.8A、10 通道半桥电机驱动器,可以用一个IC提供多路电机动力,极大的简化了电路的复杂度。系统框图如下:

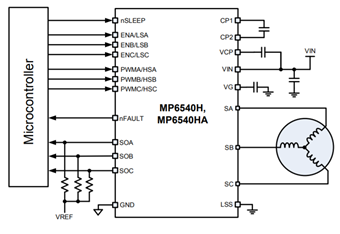
草坪修剪系统——基于MPS的MP6540H并配合控制器开发,适用于需要灵活控制驱动的解决方案。修剪草坪需要根据不同负载进行控制,MP6540H集成了由6个N-沟道功率MOSFET组成的三个半桥、预驱动器、栅极驱动电源和电流采样放大器。MP6540H的每个半桥都具有使能(EN)和PWM输入功能,可满足多种控制的需求。系统框图如下:
原理图设计 :(预计三周)深度了解参考设计的图纸,针对项目进行修改开发,讲解原理图设计方案,学习MPS在线仿真工具,并应用在开发中;
PCB 绘制 :(预计三周)展示PCB绘制过程,涉及MPS关于PCB相关教学内容的分享;
• 调试 & 应用: (预计三周)希望能得到相关评估板尽快开始工作,然后采购其他外围器件,展示调试评估板过程,设计MPS论坛debug实例内容展;完成后实现充电、移动、修剪等功能。