当开始做一款伺服电机控制产品时,选择一款合适的角度传感器是至关重要的,下面将分享我的经验。
一般来说,编码器是将数据从一种形式转换为另一种形式的一种设备或过程。在位置感应领域,编码器是一种可以检测机械运动并将其转换为模拟或数字编码的输出信号的设备。更为确切的描述是,它可以测量位置,而速度、加速度和方向数据则可以从直线或旋转运动的位置信息中得出。测量电机旋转轴角度位置或速度的标准方法是使用光学编码器。光学编码器使用LED和光电探测器,并结合轮子或圆盘定期中断或反射LED和光电探测器之间的光束以实现旋转角度测量。但光学编码器有以下几种问题:
[(1)] 成本高昂,尤其是高分辨率、绝对值型的解决方案;
[(2)] 光路易受灰尘遮挡、水分干扰,导致故障;
[(3)] 编码器零位需要手动或机械精确调整,带来密集型手工操作;
[(4)] 体积大且笨重,光学编码器小型化,不但困难而且耗资不菲。
作为光学编码器的替代,使用磁编码器来测量电机转轴角度和速度具有诸多优势,磁编码器能够满足非接触式操作、宽温度范围、对灰尘和光不敏感、宽磁场范围、高可靠性、高精度、低成本的设计要求,在许多情况下是更佳的选择,尤其是对空间紧凑型应用中。当然,成本往往是我们设计人员考虑的重点优势。
当我们进行一款产品选型调研时,了解同系列产品的原理是至关重要的,这将决定我们能不能用好相关的产品,使其在应用中发挥本身最大优势。而磁编码器根据其原理进一步可分为基于磁阻效应和霍尔效应的两类传感芯片。
1、基于霍尔效应的磁编芯片
霍尔器件包括仅仅对垂直磁场Bz敏感的水平型霍尔器件和对水平场Bx、By敏感的垂直型霍尔器件。当硅片上同时集成水平型和垂直型霍尔,传感器芯片即可感知三维磁场的变化。
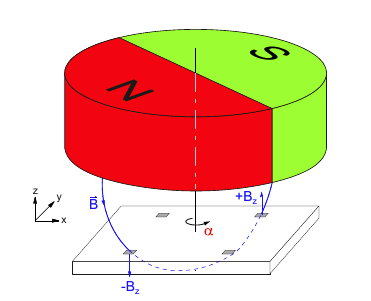
利用磁编码器检测电机轴角位置时,需要在转轴的端部额外安装一个径向磁化的磁偶极子,如图所示。径向永磁体的南北极在磁石中心上方形成一个匀强磁场。磁体随电机轴旋转,匀强磁场开始旋转,传感器应与匀强磁场始终处于同一平面。利用水平型霍尔器件或者垂直型都可以获得磁场旋转角的数值,下面将分别阐述其原理。
(1)水平型hall器件
基于水平型霍尔磁编芯片仅仅对垂直于芯片表面的磁场敏感,仅测量磁密Bz,其本质上不受Bx,By方向杂散磁场变化的影响,通常由多个均布在阵列中心的水平型霍尔元件组成传感器阵列来实现对Bz的检测。iC-MH16(iC-Haus Integrated Circuits.)、AS5600L(ams-OSRAM AG.)、AM4096(RLS MERILNA TEHNIKA D.O.O.)是典型的基于水平型霍尔的磁编芯片。
(2)垂直型hall器件
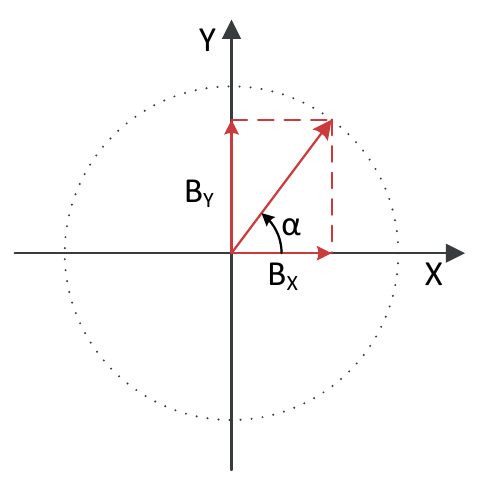
基于垂直型霍尔磁编芯片仅检测Bx,By方向磁感应强度,为了获取水平磁场的角度信息,同时测量出Bx、By,并结合公式α=atan2(Bx,By)即可得到旋转角。
实际操作中,并无将Bx、By转换为数字量的必要,X、Y轴常使用灵敏度相同的霍尔元件,实际运算仅需要两个霍尔元件上的比例即可。MA782(Monolithic Power Systems, Inc.)、EM3432(Asahi Kasei Corporation.)、MT6701(Shanghai MagnTek Microelectronics Inc.)、HAC37(TDK Corporation.)、MLX90316(Melexis.)都是基于上述原理实现的。
2、基于磁阻效应的磁编芯片
另一种类磁编芯片是基于磁阻效应实现的。1856年William Thomson注意到磁场中铁块的电阻发生的微弱变化,由此发现磁阻效应。磁阻现象是由于电子自旋引起的,而Lorentz力影响导体材料中所有电子,与电子本身的自旋运动无关,磁阻效应是完全不同于霍尔效应的现象。
当电子在电导体材料中迁移运动时,电子由于材料内部的静电力发生散射,会偏离正常的运动轨迹,这种散射运动宏观上表现为材料的电阻率增加。而电子自旋运动方向将增加或减少其散射运动的概率。
对于非铁磁性导体材料,所有能带中的两种自旋态电子数量相同,当有外加磁场作用时,增加电子散射运动概率与减少电子散射运动概率相消,其电阻率不发生变化。而对于铁磁性材料,导带中两种自旋态电子数量存在差异,当电子自旋方向与材料的磁化方向相反,增加电子散射运动概率,导致通过材料的电子数减少,表现为电阻率的增大,这即为磁阻效应的来源。
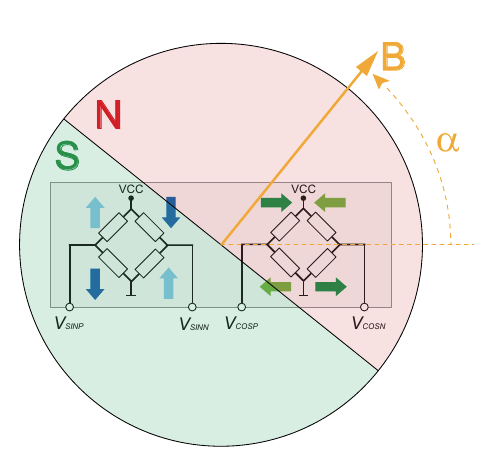
磁阻型磁编芯片内部传感电路由多个单独磁阻元件形成Wheatstone电桥的四个分支,与单一阻性器件相比,以差分方式测量的电桥结构支持更宽输出电压摆幅,还能抑制较大直流失调以消除环境温度影响。上图箭头表示磁阻桥结构的磁场敏感方向:如果外部磁场方向平行于箭头方向,其电阻最小,反之,则电阻最大。在电桥平面内施加旋转磁场,可以从两路电桥中分别获得相差90°(此处以常见的两个电桥互成90°作说明,实际中不同供应商设计方案有差异)周期性电压信号:By = V_SINP - V_SINN、Bx =V_COSP - V_COSN,将其带入式α=atan2(Bx,By)即可得到旋转角度。
霍尔型磁编芯片在使用时主要工作主要工作在线性区,改变铁磁性材料的磁化强度会影响其内部电子的运动方式,电阻值将改变,因而需要控制磁感应强度在手册中要求的合理数值,否则当超过最大磁感应强度限制,磁编芯片饱和,传感器精度将大大下降;与之不同的是,磁阻型磁编芯片可分为两类:工作在线性区和工作在饱和区。工作在线性区的磁阻型磁编芯片与霍尔型一致,需要控制磁感应强度在合理的范围内,如:TW39(iC-Haus Integrated Circuits.)、TAD2141(TDK Corporation.)、ASR002(NVE Corporation.)、TLE5501(Infineon Technologies AG.)。
对于工作在饱和区的磁芯片,当外加磁场远远大于传感器内部磁场以克服内部软磁材料磁化效应,该传感器处于饱和工作状态,届时,电阻的改变仅仅取决于磁场的方向而非施加的磁感应强度,这是磁编码器芯片另一种工作模式。饱和工作模式下带来的显著优势是,只要传感器在激励磁场下进入完全饱和状态,从该传感器获取到的角度信息就不会随磁感应强度而变化。也意味着,因振动、
应力或全寿命机械漂移导致敏感方向磁场的较小位移对角度精度的影响非常小。位移容差量取决于磁体材料和几何尺寸,但范围可能达到几毫米到一厘米,甚至更多。对于:ADA4571(Analog Devices, Inc.)、CT310(Crocus Technology, Inc.)、MT6825(Shanghai MagnTek Microelectronics Inc.)、KMZ41(NXP Semiconductors.)、KMT32B(TE Connectivity Ltd.),仅需保证达到饱和效应的磁感应强度下限的和满足信号偏移或信噪比定义所需要求即可,通常并不设上限值或具有极高的上限阈值。
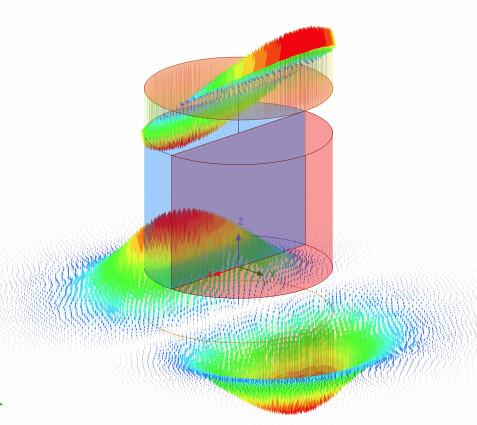
很多人会产生疑问为什么Bz方向磁场也是正弦的呢,这里放一张Bz场强的三维分布图便一目了然:
通过上述叙述,充分了解了现有磁编芯片的工作原理,以及全球各大供应商的产品方案。
实际结合项目还要考虑 应用是否需要绝对的位置角度,若需要则需要选用绝对值编码器芯片,如AMS的AS5600L,像我的应用仅仅需要增量式ABZ编码器,且我们对尺寸有机极其苛刻的要求,而MPS的MA735是目前封装尺寸最小的数字式增量式编码器磁编(增量编码器线数高达1024lines),当然其也支持SPI输出绝对的角度信息。其次,还需注意伺服系统对角度位置精度的需求,128线,1024线等。当采用绝对角度输出话,还需要考虑通讯方式的速率问题,因为在高速运动场合,用于角度通讯的时间不宜过长,角度信息需要得到及时更新,常用的有SPI、I2C、串行通讯,也是需要考虑的对象。当然,上面提到了一下数字式的磁编,对应的还有模拟式的磁编,其直接输出正弦的模拟量变化,需要后级AD 采样,cordic运算得到最终的数字角度,这对MCU造成了负荷。
以上就是我在进行角度传感器选型时总结的知识,与大家分享,共同进步。