首先对相关的磁性编码传感器的原理进行简单的回顾。
1、磁性编码器检测旋转位置信息作为磁场的变化,将其转换为电信号并输出。
2、具有轴端配置的磁性编码器结合了径向磁化的磁体和检测水平磁场强度的霍尔元件,可有效防止错位。
3、磁性编码器用于重视对环境的鲁棒性、小尺寸和轻量以及高可靠性的应用。
4、磁性编码器甚至在被光学编码器占据的市场上也开始使用,因为它的精度和分辨率得到了提高,并且可以支撑空心通轴。
再次我们回顾下磁性编码器结构
1、磁性编码器检测旋转位置信息作为磁场的变化,将它们转换成电信号并输出。最简单的磁性编码器由永磁体和磁性传感器组成。永磁体附着在电机轴等旋转体的前端,磁传感器以安装在PCB基板上的状态固定在接收永磁体产生的磁场的位置。当安装在电机轴上的永磁体旋转时,磁传感器检测到的磁场方向发生变化,因此编码器检测电机轴的旋转位置和速度。
2、下面,我们将使用由称为霍尔元件的磁传感器和永磁体组成的磁编码器,详细说明将磁场分布的变化转换为角度信息之前的工作原理。霍尔元件是一种磁传感器,它利用霍尔效应现象输出与磁场强度成正比的电压。
3、磁性编码器中使用的霍尔元件由半导体材料制成。
霍尔元件使用的半导体材料主要是高灵敏度的锑化铟(InSb)、温度特性稳定的砷化镓(GaAs)、灵敏度和温度特性均衡的砷化铟(InAs)等化合物半导体。并且还使用了可以安装在 IC 芯片上的硅 (Si)。
此外,霍尔元件有可检测垂直方向磁场强度和可检测水平方向磁场强度的两种类型。
(关于霍尔元件的详细解释,有兴趣的可以参考《磁传感器基础知识》。)
4、永磁体
磁性编码器一般采用圆柱形永磁体。永磁体的充磁方向有径向和平面(或轴向)两种。
只要满足作为编码器工作所需的磁通密度条件,就可以自由选择磁性材料和尺寸。
通常,根据用途选择温度特性良好的钐钴(SmCo)系磁铁、适合小型轻量化的钕(Ne-Fe-B)系磁铁、廉价的铁氧体系磁铁.
5、永磁体和霍尔元件的配置
磁性编码器的理想位置是旋转轴的中心、永磁体和霍尔元件在同一直线上。这种配置称为“轴端配置”。
然而,即使采用轴端配置,实际上也存在称为“未对准”的轻微位置误差。当霍尔元件未对准时,霍尔元件检测到的磁场强度发生变化,导致角度检测精度出现误差。完全消除错位是非常困难的。
然而,在轴端配置中,霍尔元件放置在水平磁场均匀的区域,因此如果霍尔元件检测水平磁场的强度,则可以减少未对准的影响。
因此,与检测垂直磁场强度的霍尔元件相比,检测水平磁场强度的霍尔元件可以减少由于未对准引起的角度误差。
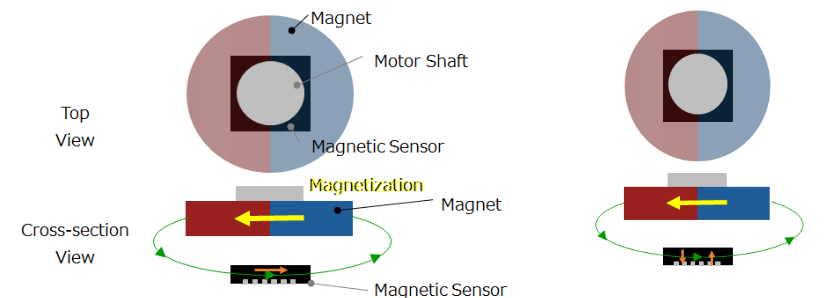
如果想减少泄漏磁场,因为沿侧面方向泄漏的磁场会对周围设备产生不利影响,请使用沿平面方向磁化的永磁体。
但是,与径向磁化的磁铁相比,水平方向均匀磁场的面积变窄,因此由于未对准而产生的角度误差相对较大。
这样,轴端配置的优点是,通过组合在径向方向磁化的磁铁和检测水平磁场强度的霍尔元件,可以轻松实现对偏差具有鲁棒性的编码器。实际上,还有一种Off-Axis configuration的用法,就是将霍尔元件放置在与Shaft-End不同的位置,但在后续部分会详细说明。
下面,我们将解释由沿径向磁化的磁铁和检测水平磁场强度的霍尔元件组成的磁性编码器的原理。
6、磁性编码器原理
6.1、检测磁场变化时的旋转运动并将其转换为电信号
当电机轴旋转时,附在轴端的永磁体产生的磁场也会旋转。此时,磁场在旋转轴中心附近区域以恒定强度旋转。霍尔元件检测磁场分布的这种变化并将其转换为电信号。霍尔元件是一种磁传感器,只能检测单一方向的磁场强度。因此,为了检测XY旋转面的旋转位置,需要检测X轴分量(Bx)的强度的霍尔元件和检测Y轴分量(By)的强度的霍尔元件。
6.2、将霍尔元件的电信号转换成角度信息
由霍尔元件转换为电信号的X轴分量和Y轴分量的磁场信息由AD转换器转换为数字信号。此外,它被发送到运算电路并使用三角函数转换为角度信息。将相互正交的X轴分量和Y轴分量合成后得到的平面图形称为利萨如图形(或利萨如波形)。在没有错位的Shaft-End配置下,旋转磁场的强度不变,所以Lissajous图形画出一个完美的圆。因此,经三角函数转换后的角度输出结果误差为零。另外,即使检测水平磁场强度的霍尔元件发生错位,输入到霍尔元件的磁场也不会发生太大变化,因此计算结果中包含的角度误差很小。
当X轴分量为Bx,Y轴分量为By时,旋转角度θ可以通过计算arctan(By/Bx)得到绝对角度。这可以用第3部分介绍的绝对方法输出。即磁编码器本质上是绝对角度传感编码器。此外,通过将绝对角度信息转换为A相、B相和Z相信息,可以增量方式/伪绝对方式输出脉冲信号。此时,如果绝对角度信息的分辨率足够高,则可以输出360ppr、1000ppr、2500ppr、4000ppr等任意分辨率的脉冲信号。
7、旋转角度传感器IC
旋转角度传感器IC是集成了磁性编码器所必需的所有磁传感器、AD转换器和角度计算电路的电子元件。
可以通过旋转角度传感器IC和永磁体的非常简单的结构实现小型磁性编码器。
它广泛用于消费、工业和汽车应用。
8、选型
MA600 是一款高精度、高带宽的磁性角度传感器,可用于检测永磁体(通常为旋转轴上的径向磁化圆柱体)的绝对角位置。 该器件与精密 TMR 传感器集成以实现高带宽与高精度 (INL),是位置控制和机器人技术的理想解决方案。
MA600 支持广泛的磁场强度和空间配置范围,并同时支持轴端(同轴)和侧轴(离轴)安装配置。其片上非易失性存储器 (NVM) 可为配置参数提供存储,如参考零角位置和ABZ/UVW/PWM 设置。
MA600 经过工厂校准,可在整个工作温度范围内实现低于 0.5° 的固有非线性。用户还可通过可配置的 32 点校正表实现最终系统校准,校准后产生的误差 (INL) 小于 0.1°。与 MA600 的通信通过 SPI 和 SSI 接口完成。
MA600 采用小尺寸 QFN-16 (3mmx3mm) 封装。
产品特性和优势
- 11.5 位至 14.5 位可编程绝对角度编码器
- 0.5°INL过温保护
- 使用片上 32 点查找表进行用户校准后可实现INL <0.1°
- 21kHz 带宽条件下具有14.5 位的分辨率
- 无延迟
- 20mT 至 >100mT 的宽磁场范围
- 用于数字角度读取和芯片配置的 SPI 串行接口
- 用于数字角度读数的 SSI 串行接口
- 增量 ABZ 正交编码器接口,每圈1 - 2048可配置脉冲
- 增量 UVW 编码器输出
- 脉宽调制 (PWM) 绝对输出
- 多圈或速度输出选项
- 3.3V 电源电压
- 7mA 静态电流 (IQ)
- -40°C 至 +125°C 工作温度范围
- 采用小尺寸 QFN-16 (3mmx3mm) 封装