准备使用MP6570,看过datasheet,有一些疑问,请问能有人知道答案吗?
(1)磁偏编码器的矫正问题,按照DATASHEET,P14中所述,将正交编码器的信号与采样数据相比较,这个现实中如何简便的实现?因为在生产中这并不是一件很容易的事情。
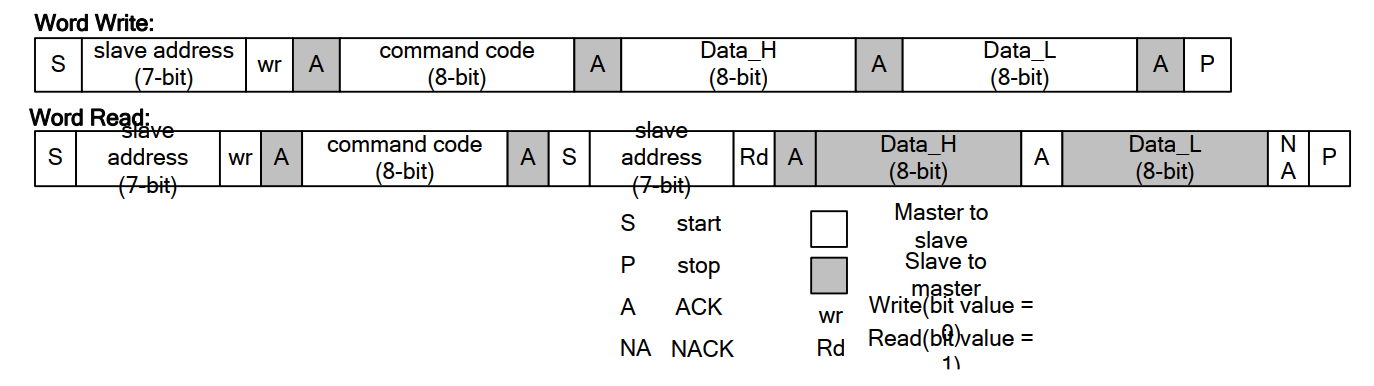
(2)采用IIC通讯的时候,具体的通讯格式是什么样的?这里面的 command code 到底是什么东西?是否能提供一下具体的例子。其实SPI和485方式的具体通讯也没有说的太清楚,P45中485方式的图示中“C”和“P”分别指的是什么?
(3)DATASHEET中多次提到,推荐使用 eMotion Family Virtual Bench online developer tool,一些关于校正和补偿的算法是非常麻烦的。有没有简单的工具,直接计算出各个寄存器应该设置的值?
(4)请问NVM的最大设置次数有没有限制?
.
1 个赞
您好,
感谢在MPS技术论坛提问。
(1) 编码器INL的校正是为了进一步提升MP6570的工作性能。实际生产的话,建议用对拖电机台来进行校正,原动力电机是装有高精度光编的,被拖动的电机是装有MP6570的。原动力电机拖动被拖动的电机 以一个稳定的转速旋转,如您提问的图11。此时电机的角度和时间曲线会呈以稳定速度为斜率的,斜直线。
定时去采样MP6570的角度值和实际的角度值reference。 Reference 就是原动力电机的光编角度值。将这个采样到的Reference和MP6570采样的角度值去做差就是我们所需要去校正的值。可以根据公式(3)(4)来填入校正的寄存器。
(2) IIC 格式如下图所示,在P43。S是起始位,address 是MP6570的地址位(多个MP6570协同工作),command code 是寄存器的地址位。
P45中485通讯的C 代表奇偶校验位,P代表停止位。
(3) 该工具是用来读写寄存器的,角度校正的方法见(1),补偿的方法一般都是直接整定会更方便点。一般速度环的带宽是50~100Hz,零点5~10Hz。电流环的带宽大概是速度环的5~10倍。带宽大,刚性较强,但噪音会大。
(4)NVM 一般能够支持到1000次的烧写。
还有问题欢迎随时留言,谢谢!
KYS
2 个赞
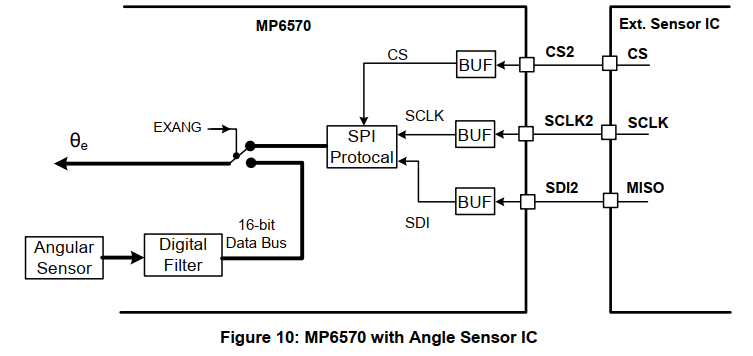
补充一个问题,请问,如果使用片外的角度传感器,如MA730,如果使用角度矫正功能。是不是需要使用MCU将MA730的数据读出来?
您好,
感谢再次提问。
如果采用片外的角度传感器,使用角度校正功能,需要MCU去读角度位置的。将Reference和读到的角度去做差,将补偿值写入到补偿寄存器中即可。MP6570读到角度传感器的角度值,会去做补偿校正的。
可以看下P12 框图,更好理解一点。
KYS
3 个赞
非常感谢您的回复,这两天仔细看了一下MP6570的datasheet,对寄存器的设置和相关算法还是有多处不理解,请不吝答疑解惑。
转矩控制模式(Torque Control Mode)
【1】 P19页ID_REF和IQ_REF设置,写道:When ID is positive:
ID_REF[11:0] = id * sqrt(3/2) * gain_ad * 1023/1.6
When ID is negative:
ID_REF[11:0] = 4096 - abs(id) * sqrt(3/2) * gain_ad * 1023/1.6
这里的 ID is positive 和 ID is negative,我怎么知道ID是正还是负?难道需要不停的采样不停的设置吗?
【2】P19页,公式(6)中Ts具体是什么?似乎没有详细的注释
速度控制模式(Speed Control Mode)
【3】P19,速度控制模式下,似乎没有设置ID和IQ,在后文中只设置了IQ_LMT,难道不需要设置ID和IQ吗?
位置控制模式(Position Control Mode)
【4】P24页,Digital Interface Input Mode中关于THETA_CMD的描述中有:
For positive reference setting:
THETA_CMD[47:0] = 65536x_cycle + x_theta / 36065536
For negative reference setting:
THETA_CMD[47:0] =248 - 65536x_cycle - x_theta/36065536
这里的positive 和 negative 是什么意思?是否是正反转的意思?
速度模式和位置模式的环路补偿(Loop Compensation in Speed and Position Mode)环节中
【5】P25页,公式(15)中Ts、spd_cont、J分别代表什么?文中没有详细注释。
【6】P25页,SAT_GAIN1和SAT_GAIN2,看完全文都没有给出数学模型,只给了一个推荐值,具体应该如何设置?
【7】P25页,GAIN_COE寄存器,虽然在P27页中有表格说明,但是这个gain coefficient具体的数学模型是什么?文中没有给出,也没有引用的公式。
【8】P26页,公式(16)(17)(18)(19)中的Fz1、Fp1、Fz2、Fp2这四个参数,给出了推荐值,我想问,在实际中,这几个值的整定难道靠试吗?
环路解耦(Loop Decoupling)环节
【9】P28页,LD_COE、LQ_COE、PHIR_COE这三个参数基本就没讲该如何设置,没有任何的数学模型。
【10】我查找全文,好像没有发现如何控制这款芯片“工作/停止”的地方,就是我想让电机“转/不转”,如何控制?
【11】您的上一个回复中,提到“一般速度环的带宽是50~100Hz,零点5~10Hz。电流环的带宽大概是速度环的5~10倍。带宽大,刚性较强,但噪音会大。”
这个在芯片中对应的具体是哪些寄存器?
【12】在使用过程中,直接设置MP6570的寄存器,芯片是否会立即做出反应,还是必须将寄存器的值写入NVM后,再上电才能生效?
【13】一个题外的问题,在与MP6570配合使用的MA730中,如果我想设置ABZ的输出为512线,是需要设置寄存器的,是不是需要在使用之前单独设置MA730?
【14】另一个题外的问题,在贵公司的资料中,可以看到最新的芯片中,有一款MP6710可与MP6570配合使用,MP6710的datasheet我还没有详细看,我的问题很浅显,MP6710具体的作用是什么?使用后有什么好处?
您好,感谢您的提问。关于MP6570更细节的问题,请您填写MPSNOW线上技术支持申请表单,我司工程师会直接联系您进行详细地沟通与解答。MPSNOW表单链接如下:
MPSNow-为您推荐电机驱动芯片产品 - 联系方式 (monolithicpower.cn)