点击下图
或下方链接可跳转至视频
优化输出动态,做到以“静”制“动"
视频文字部分 ![]()
随着科技的发展,人们对计算能力的要求越来越高。CPU,GPU,DDR等技术快速迭代。随之带来的是电源对供电质量的要求越来越高。其中描述电源质量的关键参数之一就是动态纹波。今天由我为大家介绍如何以静制动优化BUCK输出动态。
首先,什么是BUCK的动态纹波,动态纹波又是如何产生的呢?如图所示是典型的BUCK输出纹波的波形。在T1时间段内,负载电流恒定,此时输出的电压纹波称为静态纹波。在T2时间段内,负载电流突然增大,受BUCK环路控制的影响,电感电流随之上升。
在T2时间段内,负载电流大于电感电流平均值,中间的电流差额由输出电容提供,从而导致输出电压略微下跌。在此过程中,由负载动态跳变引起的纹波为动态纹波。
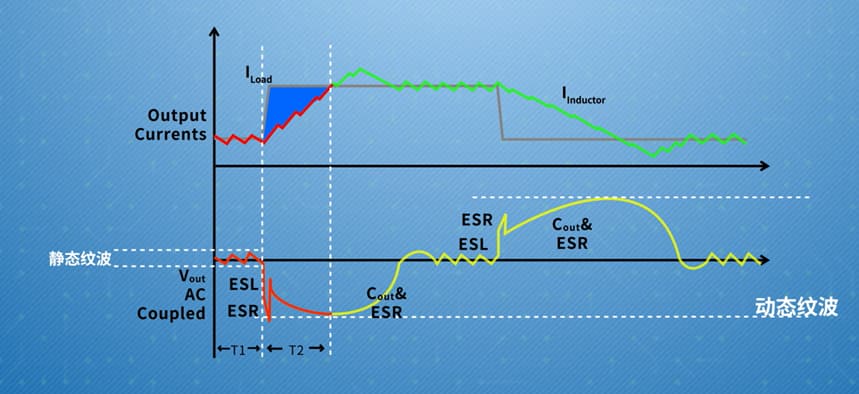
图1:静态纹波和动态纹波图
那么怎么来估算动态纹波的大小呢?
在T2时间内,假设BUCK输出的电荷差额为Delta Q,该电荷由输出电容提供,因此由于电荷差额引起的电压下跌为Delta Q/Cout。除此之外,输出电容的ESR和ESL也会带来相应的影响。由于在T2过程中负载电流大于电感电流,多出的电流差额由输出电容提供,该电流在ESR上形成的压降为 (ILoad-IL)Rc。该电流在ESL上形成的压降则为Delta(ILoad-IL)/Delta tLc。

因此我们发现在负载跳变的过程中,电荷的差额和输出电容及其寄生参数共同决定了动态纹波的大小。
在优化BUCK动态纹波之前,我们首先要讨论如何在统一标准下准确地测量动态纹波。测量动态纹波用到的第一个设备就是电子负载。我们已经了解了输出动态纹波跟T2时刻内的电荷差额有关系,该电荷差额即是图中三角形的面积。
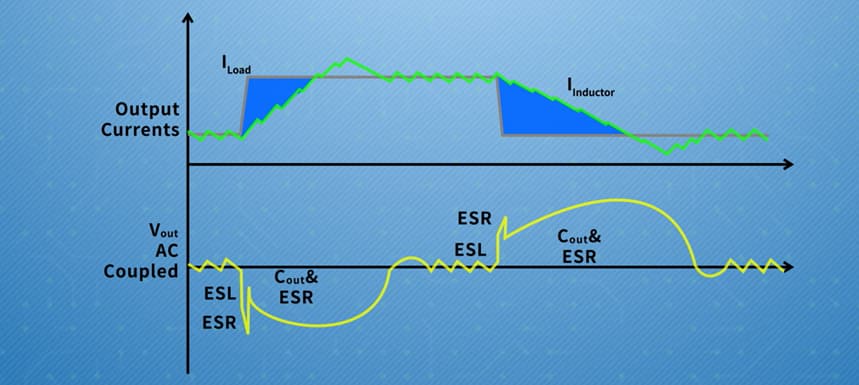
图2:负载跳变的过程中的电荷差额
如果我们改变电子负载的电流跳变斜率,我们会发现斜率越低,T2时间段内造成的电荷差额就越小,在其他条件不变的情况下得到的动态纹波幅值就越小。因此在测量和比较动态纹波时,统一的拉载斜率至关重要。
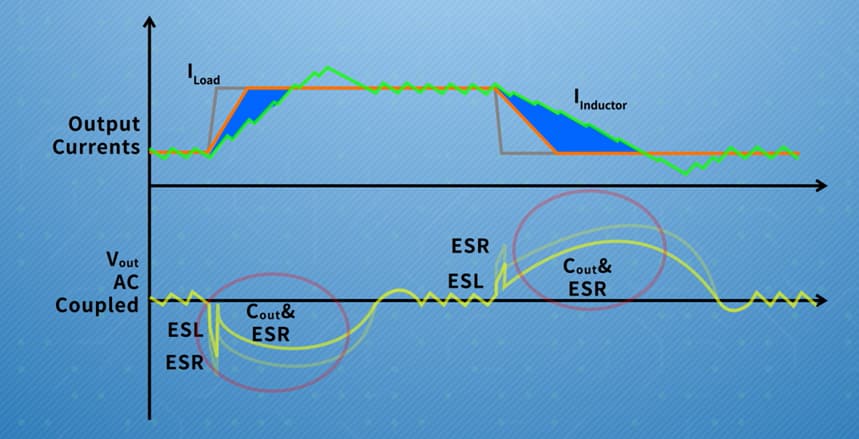
图3 :电流跳变斜率降低后,动态纹波幅值变化图
我们用到的第二个设备就是示波器,示波器探头的地线和测量笔之间往往会围成一个小环路。该环路的面积越大越容易接收到外部的干扰,从而使得实际测到的纹波波形上布满了毛刺,导致测量到的动态纹波偏大。
因此测量纹波时,我们推荐尽量缩小探头所形成的环路大小,比如使用小环探头这样可以降低噪声耦合,提高纹波测量精度。
有了小环探头,设置好电子负载的电流跳变斜率,我们就可以开始探索如何优化BUCK的输出动态纹波了。
由前面讨论的动态纹波形成的原因我们知道,纹波波形上的第一个尖峰主要是由输出电容的寄生参数ESR和ESL带来的。因此降低输出电容ESR和ESL能有效降低纹波幅值。
纹波波形上的馒头波主要受负载动态跳变过程中的电荷差额,输出电容大小和输出电容ESR的影响。
通常情况下在降低了输出电容ESR之后,输出电容的大小会直接决定馒头波的幅值。增大输出电容,纹波的幅值会随之降低。因此较大的输出电容有助于优化输出动态纹波。
在输出电容参数一定的情况下,假设单次负载跳变产生的纹波幅值保持不变。那么还有什么办法能够降低动态纹波的峰峰值呢?
工程师们自然会想到,如果将负向的纹波整体向上移动,正向的纹波整体向下移动,那么等效的动态纹波峰峰值就会降低。
其实这种方式就是在系统中加入Loadline,在输出电流较大的时候,主动减低输出电压,在输出电流较小的时候主动抬高输出电压。这使得在输出电流跳变的时候,提前为动态纹波留出空间。理论上在其他参数不变的情况下,通过加入合适的Loadline,可以使得输出动态纹波峰峰值降低到原来的一半。
我们继续从输出纹波形成的公式来看,如果能降低负载动态跳变过程中的电荷差额,也能有效降低动态纹波幅值。
对于常用的电流峰值控制的DCDC,增大系统的带宽可以加快负载跳变过程中电感电流的响应。更快的电流响应可以有效降低动态过程中的电荷差额,从而降低动态纹波幅值。
对于大电流的应用,有时候仅仅通过优化系统环路带宽很难满足一些苛刻的动态纹波要求。聪明的工程师会想到用多相并联的方式来加快系统响应,从而来达到降低动态纹波的目的。
如图所示,采用两相并联的系统,每一相的电感电流平均值为输出电流的一半,经过两相叠加,系统的等效工作频率加倍,系统的等效响应速度加快。在动态过程中产生的电荷差额得到有效降低,从而降低输出动态纹波幅值。

图4 :两相叠加后电荷差额和动态纹波幅值变化图
除了加快电流峰值控制方式的环路响应速度外,聪明的工程师还创造出一些更先进的控制方式,来从根本上加快系统的响应速度。
这其中应用最广泛的要数COT定开通时间控制。如图在动态过程中,电流峰值控制方式通过环路响应,来增大系统占空比,增大电感电流幅值,从而将输出电压调整到设计的目标值。
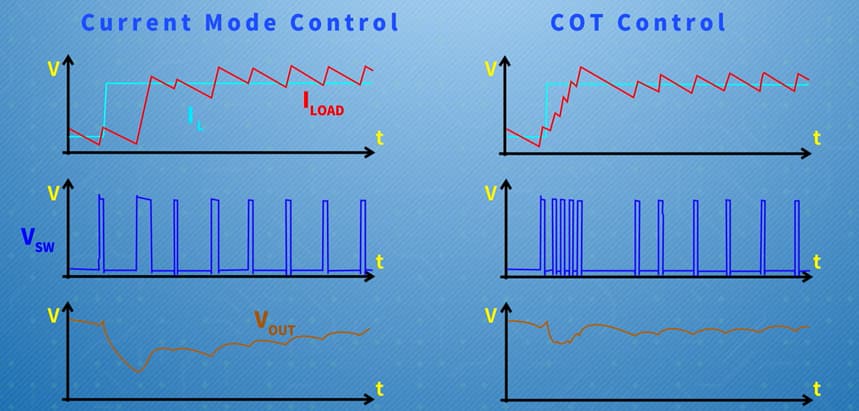
图4 :COT控制和电流峰值控制比较图
由于系统环路中的积分延时,系统的响应较慢,在此过程中会产生较大的电荷差额,从而带来较大的动态纹波。
反观COT控制,在负载动态跳变过程中,COT控制可以通过加快系统等效频率,从而使得电感电流被快速调整到目标值,降低在此过程中形成的动态纹波幅值。
了解完优化动态纹波的十八般武艺,希望能够为屏幕前的你带来帮助。更多视频请关注MPS公众号。
如有相关需求可点击 MPS NOW 在线技术支持, 工程师将为您直接提供项目技术支持服务
查看更多技术资源可访问: Resource Center (monolithicpower.cn)