【MPS电机研究院】+步进电机驱动往事
最早接触电机驱动,还是十几年前上大学的时候,那时候用L298类似的双H桥做小车电机驱动,实现小车前进、后退、转弯等功能。当时驱动的是两个直流电机,用PWM调下速度,其他的散热、可靠性、EMC基本没怎么考虑。
开始工作后,接到的第一个任务就是做一个热敏打印的设备,这个上面有一个两相四线的步进电机,当时根据大学时的经验,首选了一个H桥。打印头模组驱动电路大致如下图。
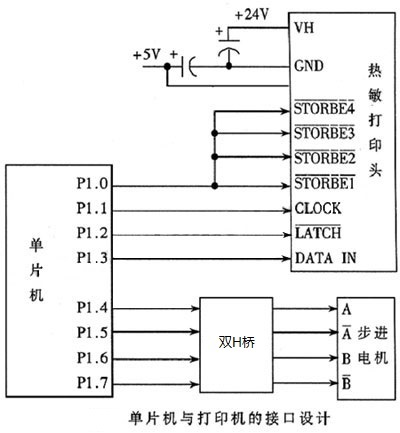
电机部分占用了4个IO口,通过控制每个IO的PWM输出,组合起来实现电机的各种动作。
刚开始做的时候,只是简单实现电机步进和打印数据匹配,还是比较容易。后面随着单片机任务增加,要处理按键,显示,数据通讯,还有为了实现不同打印效果,电机要进行细分,我就发现随着任务增加,电机就运行的越来越怪异,最明显的是电机的运行声音都变了,原来是均匀的沙沙声,后面变得怪异起来。仔细研究发现,单片机任务增多后,在控制驱动H桥的PWM脉冲时,涉及到变频的地方,中断程序会被别的一些任务挤占掉,导致脉冲规律被打乱,导致声音很奇怪,经过很仔细的程序调校才解决问题。在实际应用中后面又陆续发现这种H桥电路还有很多缺陷,比如热控制,EMC控制,都得不少额外工作才能保证可靠合规。
再做新一代产品的时候,已经积累了不少经验,也检索了很多资料,在电机驱动上,改为了专门的驱动芯片,类似MP6600这样的控制器,如下图所示。
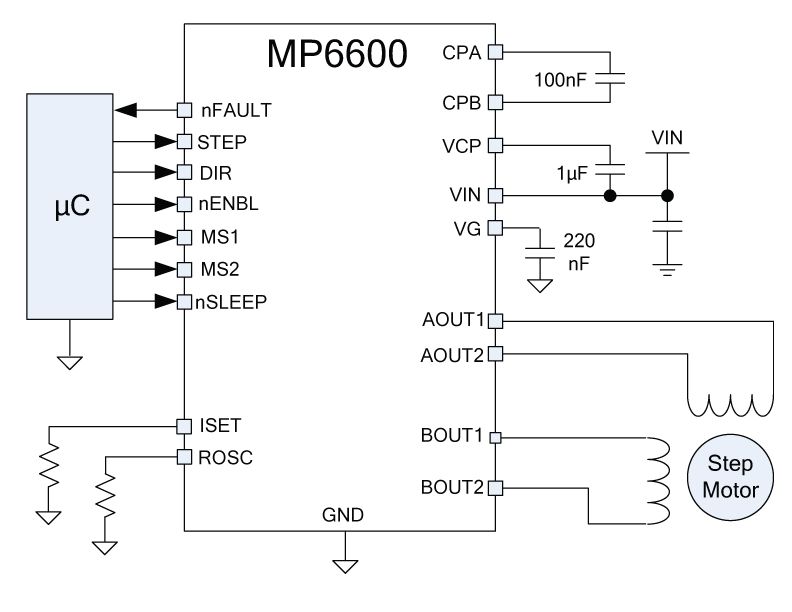
专门的控制器有如下优点:
MP6600 是一款步进电机驱动器,内置转换控制器和电流调节器。内置电流采样功能,无需外部采样电阻。
MP6600 集成度高、尺寸小,可为双极性步进电机驱动器提供节省空间的成本优化解决方案。其工作电压高达 35V,能传输高达 1.5A 的驱动电流(依据 PCB 设计和热传导情况而定)。
MP6600 能以整步、半步、1/4 步或 1/8 步模式驱动双极性步进电机。集成安全保护功能包括过流保护(OCP)、输入过压保护(OVP)、欠压锁定保护(UVLO)和过温关断保护。
采用这种专门的驱动芯片,单片机在电机控制方面几乎不占用任务时间,只需在需要电机动的时候配置一下IO口就行了,然后定时发送脉冲即可,再也不用操心调度问题了。而且芯片自带的各种热控制,电流控制,电磁兼容控制,可以极大的降低外围电路的复杂性,真是随着技术进步,设计越来越简单。