自制平衡小车,聊一聊制作过程中遇到的电机选择的坑。
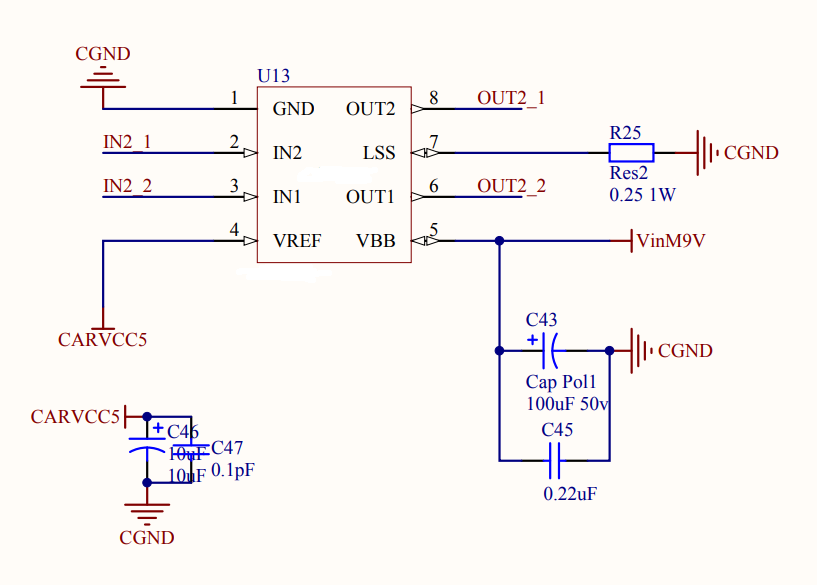
首先单片机管脚电流有限,无法直接驱动电机。这里就需要驱动电路让单片机驱动电机旋转。这里驱动芯片选择的是MPS家的MP1924。电路简洁,电机选择的是直流电机,则每个电机使用两个IO口,即可控制电机旋转的方向,其中一个IO口,输出PWM方波,通过控制PWM方波中高低电平比例,即可控制电机的速度。
最初选择了这个电机, 12V .120转。
平衡车成功地站立起来了,但是抗干扰性不强。仔细分析了原因,认为还是电机减速比太高,输出转速过低(120rpm)。这样导致在对抗干扰时,输出的速度不够快,无法很快地恢复到平衡态。
于是第二次选择了这个电机,这里犯了个错误,贪便宜购买的二手的电机(凭外形猜测电机参数 ![]() )。
)。
结果遇到了很大的坑,电机的转速倒是能符合预期了,但是在PWM高频的状态下(2000HZ)电机的低速驱动效果很差。在PWM频率为2K时,驱动电压在8.2V 情况下,占空比低于30%时,电机就几乎不转,没有驱动力了。而通过计算,8.2V的30%,等效电压在2.46V,使用2.46v的直流电压去驱动电机,电机又能正常旋转。翻阅资料,查找原因,定位到电机的感抗问题。最终只有降低PWM波的频率,降低到80HZ,输出才能符合需求,但是此时单片机对电机控制频率(设定为100hz)超过了PWM的频率,控制效果也是极差了。
最后选择了这对电机。12V,400rpm。使用2000Hz的pwm进行驱动,平衡小车终于能够很好地站起来了 ![]() 。
。