很多时候IC厂商之间对某些参数指标没有明确的规范,所以,我们在选择步进电机驱动器时,不能完全依赖数据手册中的规格参数,它们的定义可能不同,适用情况和现实情况可能相去甚远,有时甚至是彻头彻尾的误导。我们需要结合自身应用,更深层次的理解和计算。
今天,我们将和大家一起共同探讨如何正确选择步进电机驱动器。
点击图片或下方链接查看直播回放,下载讲义
如何正确选择步进电机驱动器

首先,我们将了解步进电机的基础知识,以及如何去驱动一个步进电机。
其次,我们将通过典型步进电机驱动IC的 数据手册,来了解步进电机驱动器的主要特点和技术指标。
最后,我们将展示如何理解数据手册中的规格参数,并将它们和实际应用联系在一起。
在这个过程中,你会发现你必须要自己做一些工作,而不是相信你在数据手册上看到的一切!
我们先来了解下步进电机的基本构造,以及它是如何运转起来的。
图1:两相永磁式步进电机和混合式步进电机的基本结构
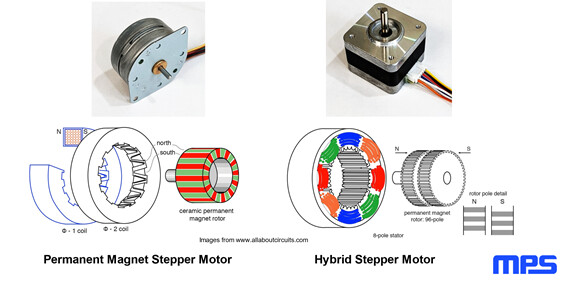
混合式步进电机的定子一般由8个磁极构成,两相绕组错开缠绕在8个磁极上,它的转子结构比较复杂,内部为圆柱形永磁铁,外套软磁性材料,使得一部分被磁化成N极,另一部分被磁化成S极,定子和转子周边有小齿和槽。
虽然这两种电机的结构不同,但都依赖于带有永磁体的转子,通过改变定子线圈上电流的大小和方向来产生变化的磁场,吸引和排斥带有永磁体的转子,使得电机能够朝着一个方向连续转动。
接下来我们来了解下如何驱动一个两相双极型步进电机。
通常我们采用双全桥结构作为驱动电路。前面我们提到通过改变定子线圈上电流的大小和方向可以在磁极上感应出不同的N/S极,进而吸引和排斥带有永磁体的转子来实现电机转动。下面我们以整步驱动方式为例,来看下具体的操作:
首先我们将步进电机的定子和转子简化成图2中左图示意,以便说明。
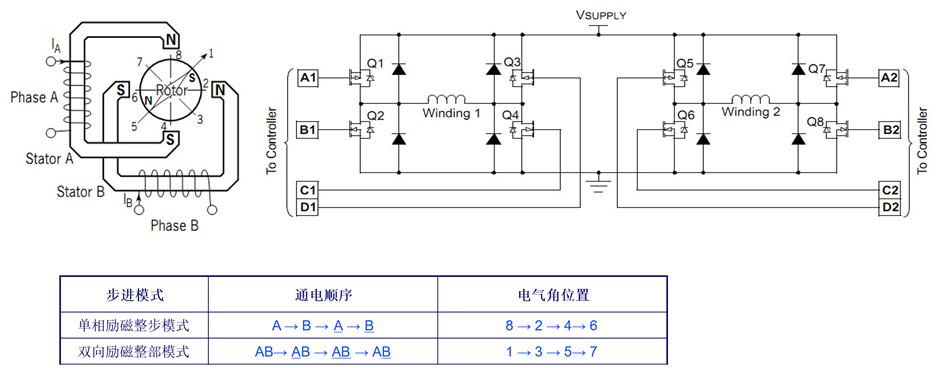
当A相绕组正向通电时,也就是图2中的右图全桥电路中打开Q1和Q4,根据安培定则,会在A相定子磁极 上端 感应出N极,下端感应出S极,转子的S极就被吸引到位置8;B相绕组正向通电时,也就是打开Q5和Q8,会在B相定子磁极 左端 感应出S极,右端感应出N极,吸引转子S极到位置2;同理A相绕组反向通电时,吸引转子S极到位置4;B相绕组反向通电时,吸引转子S极到位置6;如此循环,电机就朝着一个方向转动起来了。
由此可见,A/B两相驱动存在90度相位差,就像正弦和余弦的关系。
当然还有一种整部控制方式,在同一时刻,两相绕组都会通电。
A/B两相正向通电时,A相定子磁极 上端 感应出N极,下端感应出S极;B相定子磁极左端感应出S极,右端感应出N极,转子S极就会被吸引到位置1。A相绕组负向通电,B相绕组正向通电时,转子被吸引到位置3。接下来依次是位置5和位置7,如此形成矢量闭合。
相较于单相驱动,双相驱动效率更高,力矩更大,因此在实际应用中较为常见。
步进电机的机械步进分辨率是由电机本身结构决定的,准确的说,是由定子和转子上的齿数来决定。
一般来说,步进电机转一圈需要16-400个脉冲信号,其中每转一圈需要200个脉冲信号的步进电机最为常见,它们的定子和转子有50对极,步距角为1.8度。由于电机的机械分辨率受到实际生产制造的限制,很难再通过机械的方式来实现0.9度以下的位置控制。为了进一步提高步进电机的控制精度,我们引入了细分控制。
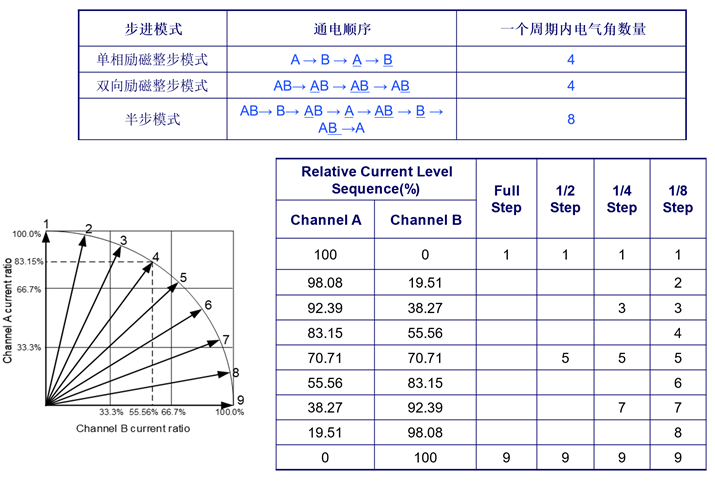
前面我们介绍了整步模式下的单相驱动和双相驱动,当我们把这两种驱动方式交替的结合在一起,就产生了半步控制。这种控制下 一个电周期内有8个电气角位置,比整步模式多了一倍,因此对于同一个电机转过相同的角度,半步模式需要的脉冲个数也会比整步多一倍。换句话说就是同样数量的脉冲信号,电机转过的角度只有整步的一半,提高了控制精度。
我们将电周期看作一个圆周,以1/4圆周为例(如图3),整步模式下驱动的位置有1和9;半步模式下驱动的位置是1,5,9;继续按正弦电流调制,得到了1/4步,增加了位置3和7……以此类推,两相驱动电流被不断分割得到更小的步进增量,这就是微步。
这里我们提一点,以1/8步为例,一个电周期需要32个脉冲信号,而在机械上一个电周期电机仅仅只是转过了一个对极。所以对于一个50对极的步进电机来说,如果用1/8步电流控制,那么机械上转过一圈就要1600个脉冲!
图3
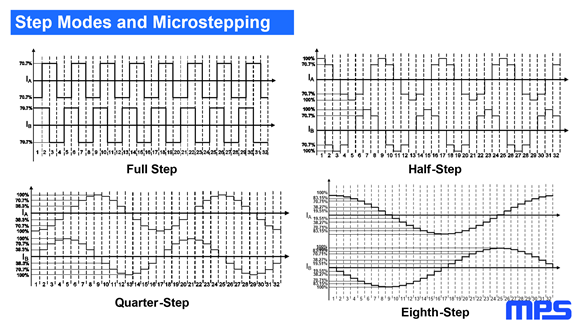
前面我们说到了步进电机细分控制原理,现在我们来看下不同细分步数下的电流控制波形(如图4)。
在整步模式中,只有一个电流平台被驱动,正负交替,一个电周期内只有4个状态,对应4个电气角位置。
在半步模式中,有两个电流平台,分别是100%电流和70.7%电流,一个电周期内有8个状态;1/4步下有4个电流平台,16种状态;以此类推…
从驱动电流形态上看,如果细分步数越多,两相电流越接近正弦和余弦波形,电机转动会更顺滑,噪音也会更小。
图4
接下来,我们来看一下典型的步进电机驱动IC是什么样的。
图4是MPS公司一个典型步进电机驱动IC的内部原理框图。它包含了基本的电源模块,两个全桥电路,门级驱动电路,电流采样电路以及一些逻辑控制单元等。
图5:MP6500典型步进电机驱动IC的内部原理框图
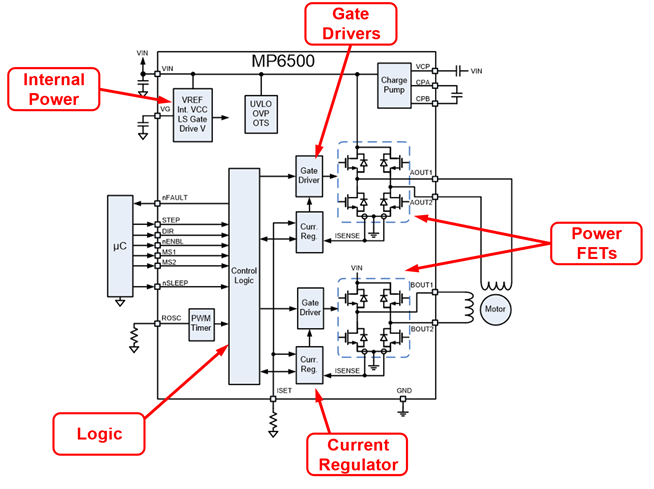
这其中还有一个用于控制步进的状态机,我们称之为索引器,门级驱动电路根据状态机来驱动后级功率管开通和关断,进而控制相电流的大小和方向,以实现准确的电机位置控制。
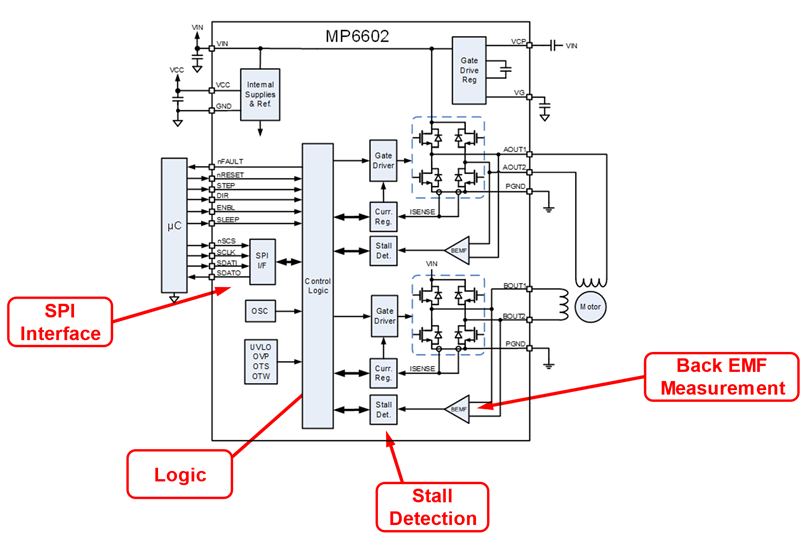
图5是一个改进型的步进电机驱动IC,它除了前面提到的这些基本模块以外,还使用了SPI接口,用来访问故障诊断寄存器和其他功能设置。此外,这个改进型驱动器还可以直接测量电机反电动势,可用于转子失速检测,或者速度闭环控制等。
图5
复杂的步进电机驱动器可能还包括运动轨迹发生器,它可以通过编程自动的将电机从静止状态ramp到目标速度,也可以通过一个指令,一定的步数,缓慢回到静止状态。
接着,我们来看下IC数据手册。
在典型的步进电机驱动IC手册上,我们通常会在第一页看到一个基本功能列表。上面提到的这些特性都是选择步进电机驱动器时需要考虑的。但正如我们稍后将看到的,其中一些特性只能作为参考,不能认为它们都适用于你的应用。
下面我们来逐个查看重要的技术指标(图6)。
图6
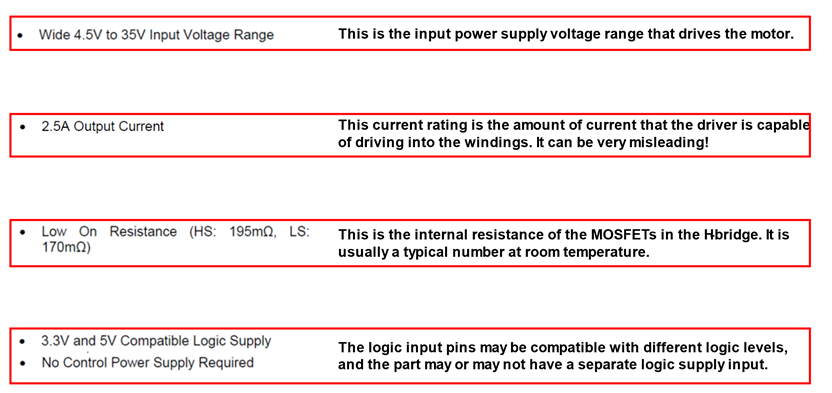
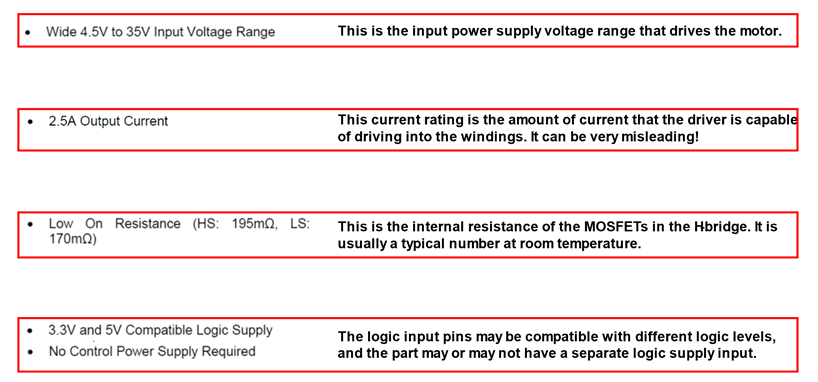
我们需要关注的第一个重要指标就是输入电压范围,它表征了这颗IC的最大和最小工作电压,电机驱动电压必须落在这个范围内。
接下来是输出电流,它表征了这颗IC驱动负载 输出电流的能力。由于芯片厂商之间没有明确的规范,这个电流可以是持续电流,峰值电流或者其他形式的电流,所以仅仅盯着这个电流数值可能没有太大意义,甚至有时候还会误导你。
当然在任何情况下,这个电流值必须等于,或者更有可能大大高于你想要驱动到绕组的电流。
MOSFET的导通阻抗对于驱动器真正可以提供多少电流至关重要,它可用于IC发热计算。稍后我们也会详细讨论这一点。
接下来是逻辑接口,不同产品的逻辑接口可能有所不同。
一些步进电机驱动IC具有单独的逻辑电源引脚,逻辑高低电平阈值 与该逻辑电源电压成正比。另外一些则有固定的逻辑阈值。你需要确保逻辑输入电平与你的系统相兼容 – 假如你的控制器 逻辑高电平 只能驱动到1.8V,那么当你使用仅为3.3V 逻辑电平 设计的驱动器时,就很有可能会遇到问题。
图7展示的是步进电机驱动IC的主要功能。选型之前,你应该很清楚你的应用需要哪些功能。
图7
点此链接查看下篇: 【工程师笔记】如何正确选择步进电机驱动器-下
如有相关需求可点击 MPS NOW 在线技术支持 , 工程师将为您直接提供项目技术支持服务
查看更多技术资源可访问:Resource Center
