智能车竞赛中的电机驱动设计
在智能车竞赛中,有刷驱动是十分重要的部分,驱动部分的合理设计可以大大提高车的稳定性以及减少烧毁的可能性。电机驱动因为意外短路或焊接不良时可能会导致发烫,MP6528 的过热保护可以非常有效地保护芯片,避免过热损坏。另外,如果 MOS 选取不合适,导通内阻过大,则会导致发热较为严重。为了解决这个问题,我使用了低内阻 MOS。
智能车比赛中有刷驱动DRV8701应用十分广泛,而MP6528芯片相较于DRV8701主要有如下两个优势:
- MP6528通过涓流充电电路确保在高边驱动时维持充足的栅极驱动电压,提供更稳定的性能,可以达到100%占空比。
- MP6528的可调死区时间控制提供了更灵活和精细的保护设置,适应不同应用需求,使其能在驱动信号频率较高时良好工作。
电路组成
3V3:使用一个LDO将输入电压转换为3.3V,驱动LED作为电源指示灯,同时为MP6528的ENX和nSLEEP引脚提供高电平信号。
逻辑门部分:MP6528驱动信号输入方式为PWMA/B来控制电机A/B两端电平为高或低,在此种驱动模式下如果需要控制正反转的转速则需要两个PWM资源,为节省主控MCU的PWM资源,改为输入EN/DIR信号(EN信号占空比设置转速,DIR高低电平设置方向),通过逻辑门组合将EN/DIR信号转换为PWMA/B信号,进而控制MP6528。
驱动部分:MP6528控制H桥的MOS,DT引脚的电阻阻值可以设置死区时间,nFAULT引脚拉低时代表有异常情况出现。
走大电流
为了能够给电机提供足够电流,我在正面使用 VCC 铺铜,背面使用 GND 铺铜,电流从正面铺铜流入 MOS,经接线端子流入背面 MOS 再流入背面铺铜。
####散热风格
MP6528的散热主要由底部焊盘来实现,MOS因为通过铺铜与表面铜皮连接良好,散热效果也十分优良。
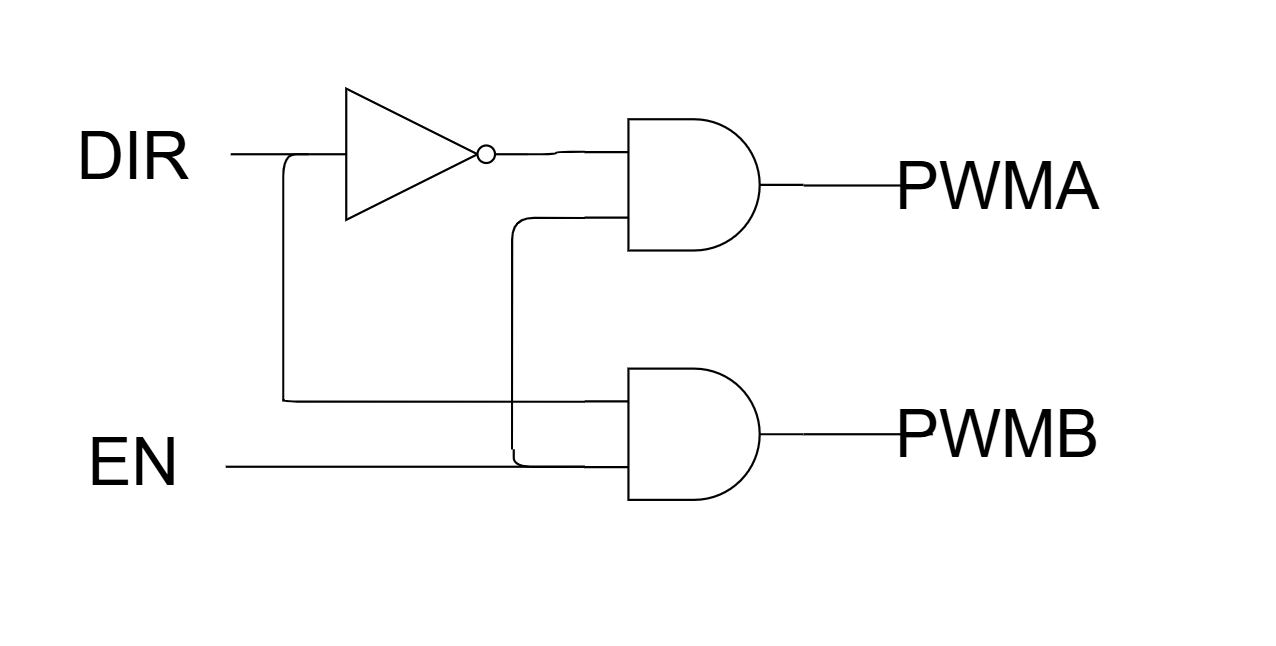
驱动逻辑
在智能车竞赛中往往只会有一个单片机,而需要驱动多个电机,因此节省 PWM 资源十分重要。MP6528 信号输入方式为 PWMA/B,如果要能控制正反转的转速,则需要连接两个单片机的 PWM 输出通道,比较占用 PWM 资源。因此,我使用与门和非门的组合来实现 EN/DIR 信号输入转换为 PWMA/B 输入,节省主控的 PWM 资源。逻辑门示意图如下: