步骤3:频率补偿器设计
一旦完成开环传递函数建模,就需要设计频率补偿器来实现最佳性能。由于上述传递函数的频率响应有两个独立极点(一个在低频,一个在高频),因此可设计一个简单的II型补偿器,该补偿器不需要额外零点。电压控制模式则需要引入零点补偿,因其存在导致谐振的双极点。
为了最大限度地减小稳态误差,需设计一个反向零点(或在原点设置极点),以便在低频段提供更高增益。为确保系统稳定性不受影响,其频率应比首个极点至少低 10 倍,计算公式 (15)如下:

由于高频段存在ESR寄生效应,因此还需设计一个高频极点来补偿并去除该效应。该极点估算公式(16)如下:

除此之外,通过修改截止频率来实现更高/更低带宽,提供更快/更慢动态响应也是一种常见手段。一旦选定截止频率(在本例中, fC 增加到6.5kHz ,或fSW的10% ),就可以用公式 (17) 来计算补偿器的中频增益:
完成补偿器频率范围设计之后,需要计算无源元件的取值。
步骤4:设计补偿器的无源元件
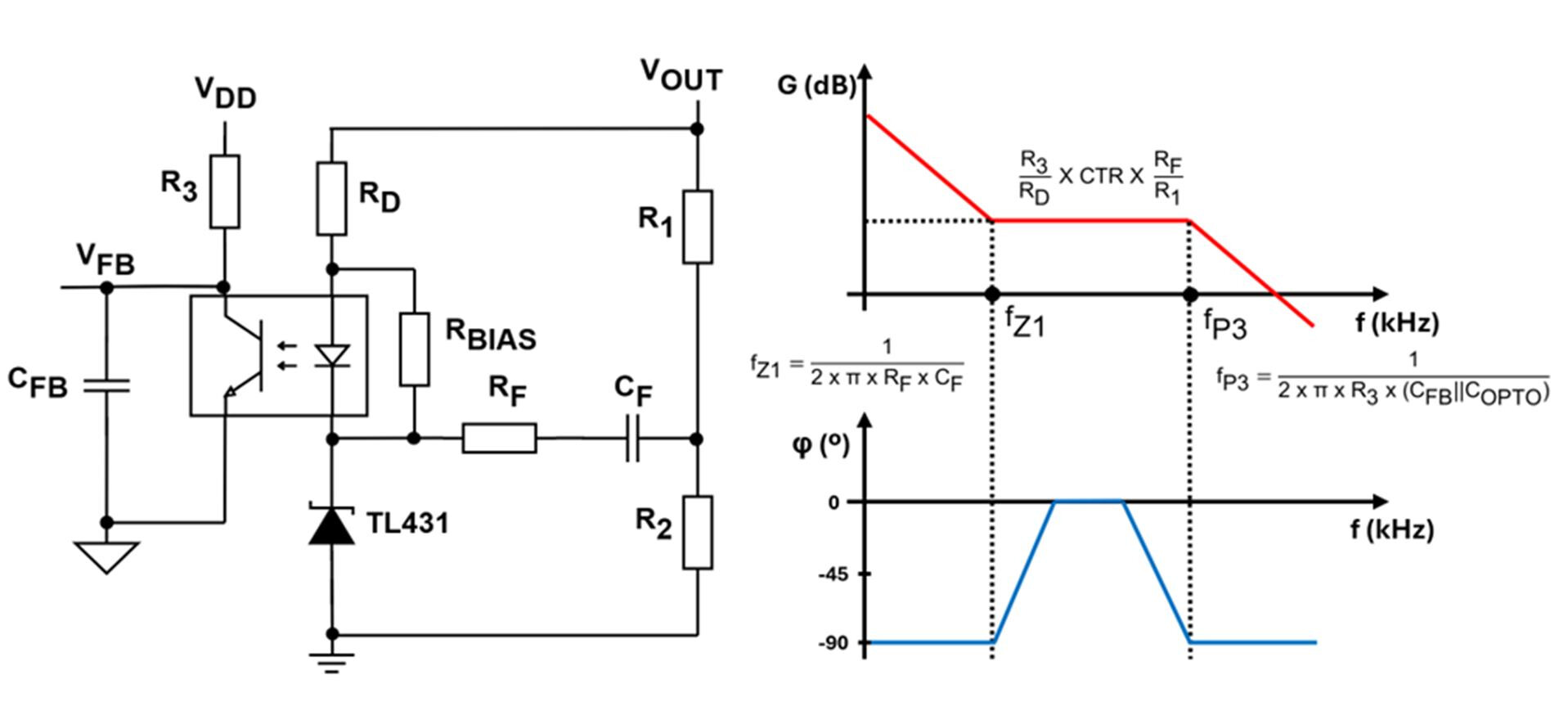
为了稳定带交叉调节的电流控制模式反激式变换器,最常用的II 型补偿器均采用光耦反馈(见图 3)。
图3:采用光耦反馈的II型补偿器
采用光耦反馈的补偿器传递函数可用公式(18)估算:

中频增益由两级构成:光耦增益和可调电压基准补偿器增益,计算公式(19)如下:
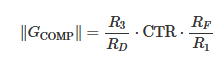
计算出最大电阻对正确偏置光耦也非常重要。通过公式(20)可估算该电阻值:

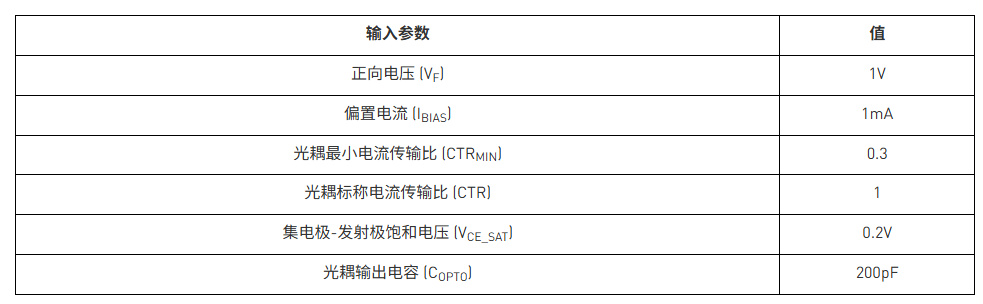
计算RD 所需的参数可在光耦和可调电压基准数据手册中查得。表2列出了这些光耦参数的典型值。
表2:主要光耦参数
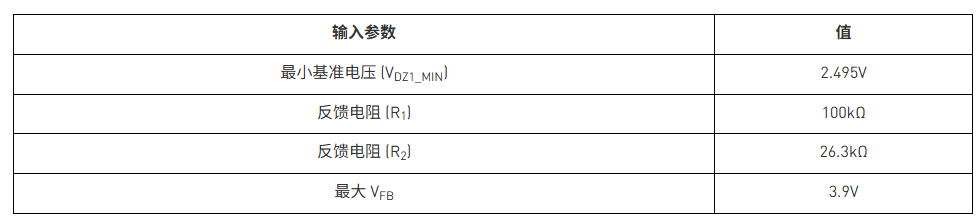
表 3 列出了可调电压基准参数的典型值。
表3:可调电压基准参数
获得上述参数之后,即可通过公式(21)计算 RD:

获取 R3 值(在本例中,R3 位于HF500 -40 控制器内部,最小值12kΩ),以及 R1, R2, 和RD ( RD = 2kΩ)之后,再通过公式 (22) 估算 RF :

其中, GCOMP 为补偿器中频增益,通过公式(17)计算得出。该参数用于调整电源带宽。
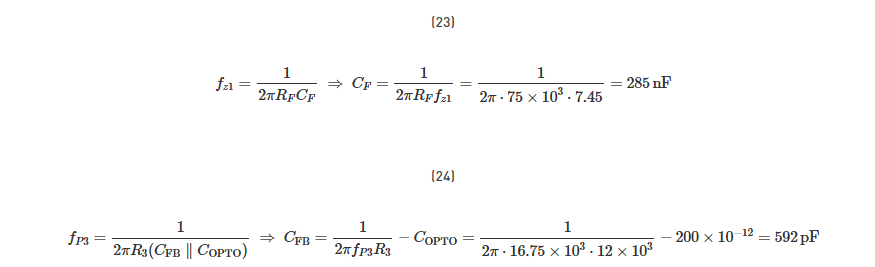
基于之前得出的反向零点和高频极点,分别用公式(23)和公式(24)计算 CF and CFB:
设计好开环系统和补偿器后,利用公式(25)估算环路增益传递函数:

公式(25)基于公式(13)和公式(18)。
计算相位和增益裕度对于确保电源的稳定性也非常重要。
相位裕度可以用公式(26)计算
输入相关值后,通过公式(27)计算出相位裕度:
如果相位裕度超过50°,则该参数符合相关标准规范,具有重要设计意义。
与此同时,增益裕度可通过公式(28)近似计算得出:

在指定频率下,通过公式(25)推导出公式(29):
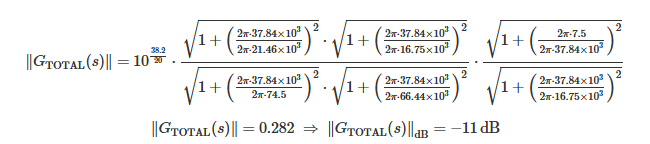
在此情况下,增益裕度低于-10dB ,这是需要重点考量的另一个重要参数,尤其涉及是否符合规范。若结果接近0dB ,则需通过多次迭代降低该值,否则系统将无法达到最佳性能。迭代必须首先从降低截止频率值着手。
至此,该完整传递函数通过以下方式为电源提供了最佳稳定性和性能:
- 最小化稳态误差
- 最大限度减少ESR寄生效应
- 将电源带宽提高至6.5kHz