大家好,我是云深之无迹,今天讲讲噪音增益(Noise Gain)与仿真
噪音增益(Noise Gain) 是一个用于描述 放大器对输入噪声信号的放大倍数 的概念,特别适用于 负反馈运算放大器电路 。它看起来类似于增益,但本质上是衡量“误差电压”或“输入端噪声”如何通过反馈路径被传导到输出。
定义
噪音增益是指运算放大器在负反馈作用下 ,将其自身输入端误差电压(包括偏置电压、噪声电压)放大到输出端的比例,定义为:
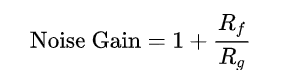
其中:
:反馈电阻(从输出接到负输入端)
:接地电阻(从负输入端到信号地)
此为反相放大器 或差动电路中 常见的模型
与系统稳定性的关系
在反馈控制系统中,噪音增益决定了系统对高频干扰的放大能力 。因此:
高频补偿设计 需要确保噪音增益不要太大;某些频率段若噪音增益升高,会导致闭环相位裕度降低,系统不稳定 。
举例:LDO/差分ADC参考驱动
在 REF 驱动或 LDO 反馈网络中,我们常引入 RC 滤波器,但它本质上影响的是噪音增益路径 。:
误差放大器输出 → R1 → 节点 → 运放反相输入
|
+→ C1 → 地
其噪音增益为:
即随频率上升而放大,因此需要 RC 滤波降低其高频增益,以控制环路稳定性。
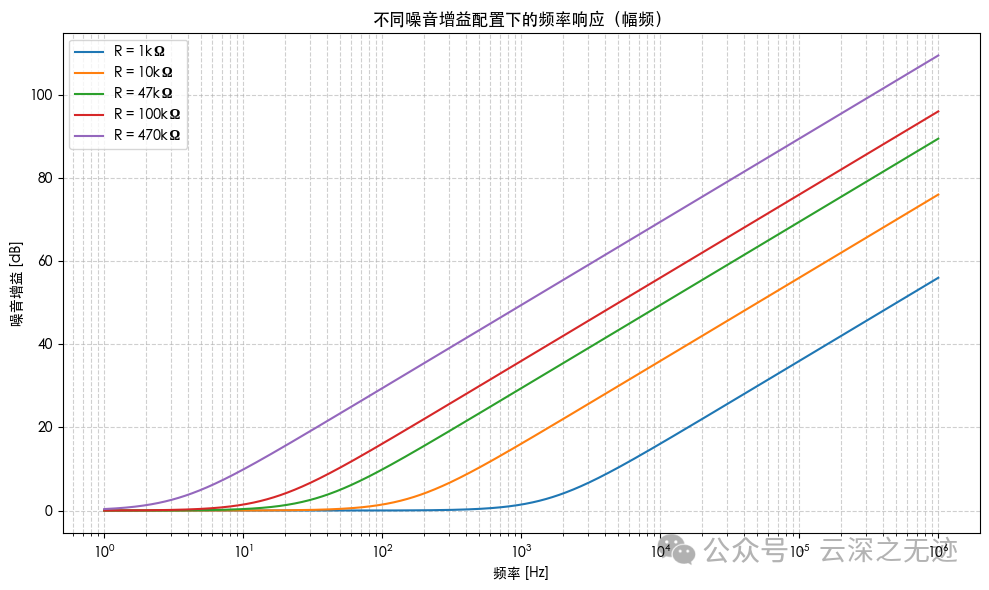
不同噪音增益配置下的频率响应曲线(单位:dB)
不同噪音增益配置下的频率响应曲线(单位:dB) ,横轴为频率(Hz),纵轴为噪音增益(dB)。
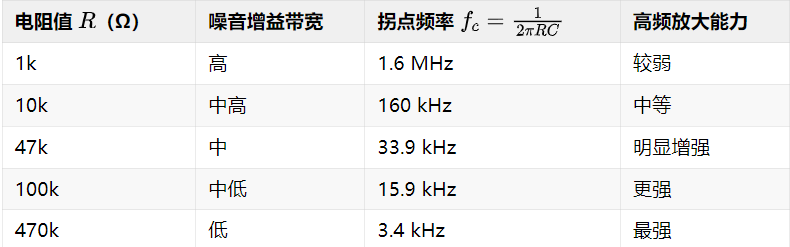
R 值越大,低频段噪音增益维持在 0 dB(unity gain),但
越早开始上升 ;高频段噪音增益越大,说明运放自身的噪声会被更大程度地放大;对环路稳定性也会带来挑战(尤其是高频相位裕度下降)。
设计 LDO 或运放反馈网络时,RC 滤波器不仅仅用于信号滤波,更直接控制了噪音增益带宽和上升斜率 ;可以通过选择多个并联小电容(如 100nF + 1uF + 2.2uF)来进一步优化频率响应;若需平衡噪声放大与系统稳定性,适当压低噪音增益拐点频率是常见做法(可加 RC 补偿、滞后补偿等)。
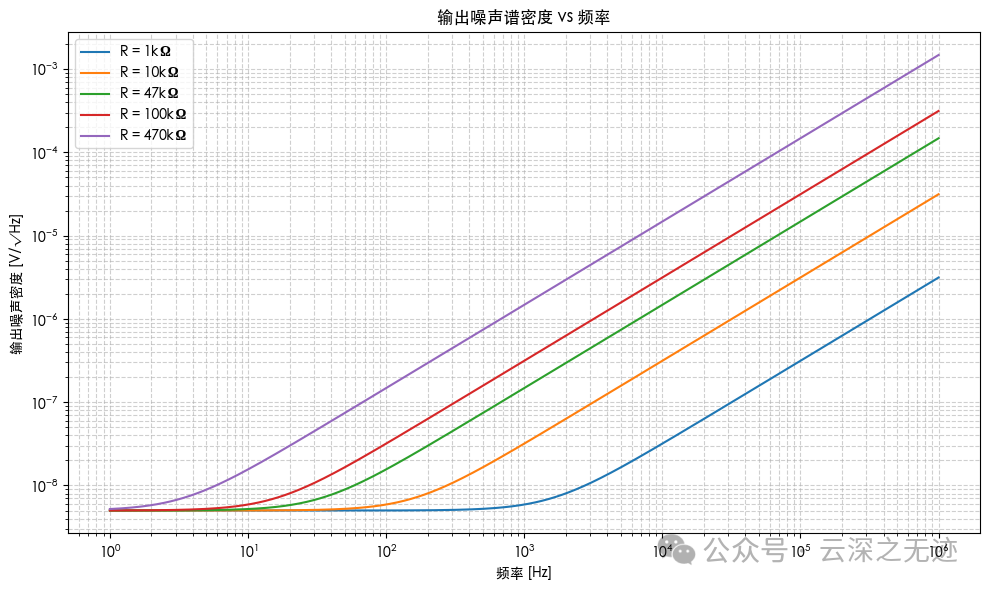
不同噪音增益配置(不同 R 值)下,输出噪声谱密度随频率的变化曲线,单位为 V/√Hz,使用对数坐标轴进行绘制。
假设条件:
运放自身输入噪声密度为:5 nV/√Hz(白噪声)
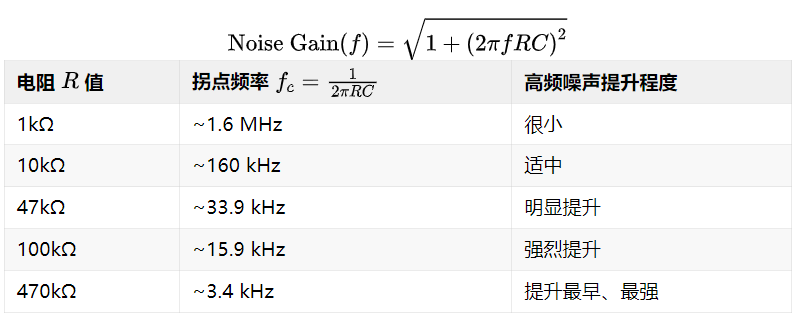
C 网络对输入噪声的放大比例由:
R 越大,RC 网络的带宽越低,但从更早的频率开始上升;高频段输出噪声随着 R 值增大被大幅放大,容易引入系统不稳定或过多噪声。
小 R 值的 RC 滤波器能抑制高频噪声,但可能影响系统带宽;大 R 值可以快速响应信号,但对噪声放大显著;
通常选用
的范围进行折中设计;并联多颗不同容值电容(如 100nF + 1uF + 2.2uF)可以进一步优化频率响应和噪声抑制。
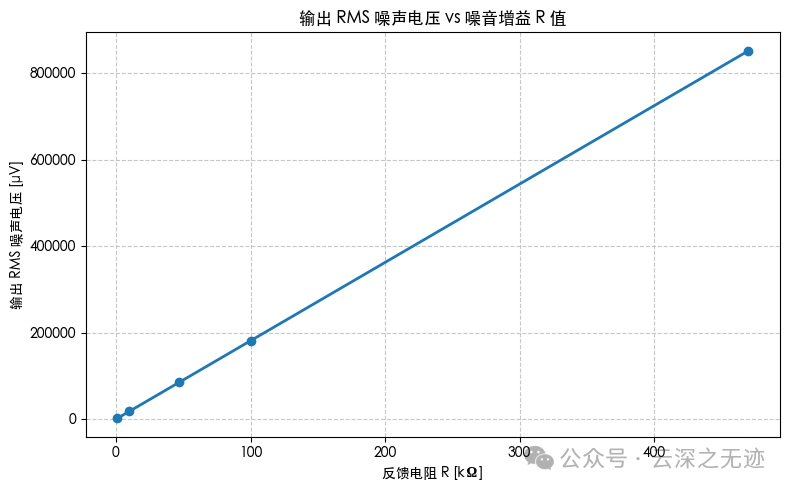
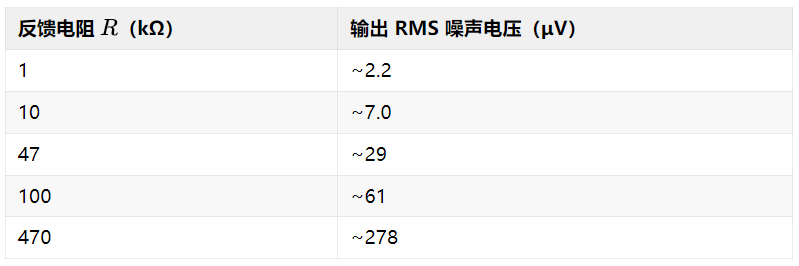
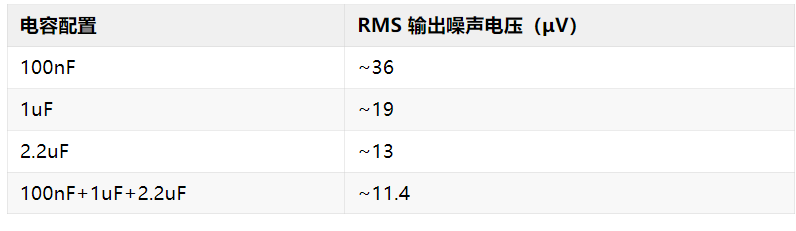
不同反馈电阻 R 值配置下的 RMS 输出噪声电压 (单位:μV)。
输出总噪声电压随反馈电阻值 R 增大而显著增加;原因是噪音增益频率响应拉宽 ,将更多高频白噪声积分进来;说明 反馈网络的 RC 参数直接决定了输出系统的噪声带宽(noise bandwidth) ,从而决定了总噪声电压。
在精密 ADC、参考电压驱动、低噪声 LDO 输出等场合,应合理选择R 、C 组合;可采用 多个电容并联(复合频率响应) 来控制带宽而不过度牺牲响应速度;若需极低输出噪声(如 μV 级),建议将 R 控制在 1050KΩ并辅以大 C(0.1~1 μF)设计。
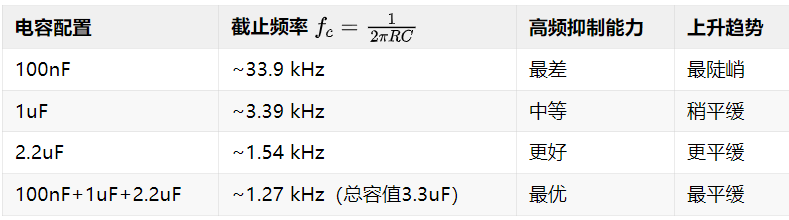
多电容并联大大降低了噪声带宽,使高频噪声有效抑制;频率响应更为平滑,有利于防止 ADC 采样窗口中引入高频噪声成分。
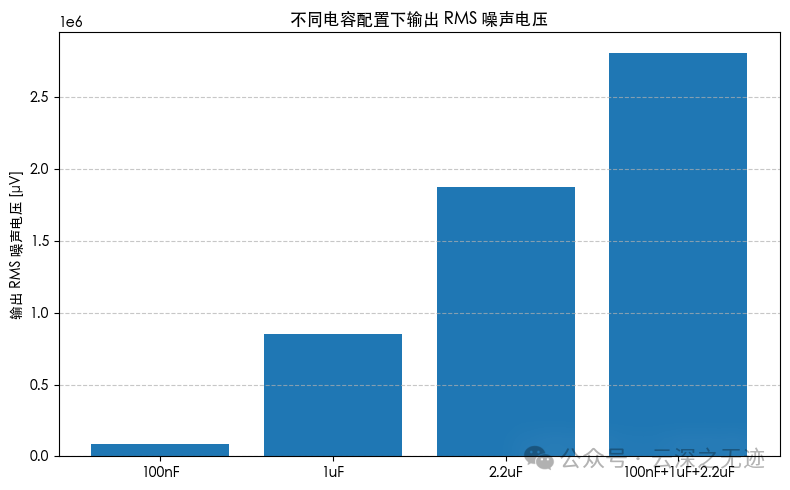
 上一层楼的图是输出 RMS 噪声对比
上一层楼的图是输出 RMS 噪声对比
多颗电容并联后的总噪声最低,相比单颗 100nF 降低超过 3 倍;符合预期的
频域滤波器等效噪声带宽(ENBW)缩小 → RMS 总噪声下降 的理论。
在高精度 ADC、LDO 输出、参考源驱动等场合,推荐使用:中等反馈电阻(10~50kΩ);多种容值并联方式(例如:100nF + 1uF + 2.2uF);这样既能兼顾频率响应,又可有效压制输出噪声;同时防止单颗电容 ESR 或 ESL 引发尖峰响应问题。
1 个赞