创意名称:带有角度识别的减速器
参赛物料:
- MA782, 2片(其中一片备用)
创意设计:
- 基于已有的行星减速器,增加角度传感器,实现一个具有角度识别的减速装置
创意名称:带有角度识别的减速器
参赛物料:
创意设计:
一、创意名称
基于MPS的智能家居六能交互机器人
二、项目概述
做一款能说话、能行走、能拾音、能看懂、能跟随、智能机器人。可以用来当做日常陪伴,具备物联网功能,能够控制家里的智能家居设备,能够远程控制机器人行走并查看监控状态,能够通过增加一些小夹具,完成搬运小物件功能等等。
三、大赛必选物料及数量:
(1)【电源】
MPM3519
数量:3片
作用:为整个机器人提供电力
(2)【动力核心】
驱动器:MP6540H
数量:2片
作用:直接驱动无刷电机(BLDC),决定机器人速度及力矩。
(3)【位置感知】
磁角度传感器:MA600A
数量:2片
作用:实时反馈“电机转了多少度”,实现FOC闭环和精准关节控制的关键。
(4)【电流感知】
电流传感器:MCS1805
数量:2片
作用:实时监测电机电流,防止电机堵转烧坏。
二、自备物料
(1)无刷电机
作用:通过FOC闭环控制实现精准定位,控制机器人的一个关节做精准运动。
(2)步进电机FOC闭环驱动器及电机套件
作用:用来控制机器人的一个关节运动
(3)MCU开发板
作用:机器人的核心中枢,协调机器人各种动作
(4)显示屏
作用:实时状态显示,方便于机器人交互
(5)电池
作用:用来给机器人提供动力
(6)各种贴片电阻、电容、晶体管、指示灯等
作用:完成必选物料的电路搭建
(7)PCB板
作用:根据官方提供的必选物料设计PCB,完成电源、驱动等各部分元器件的集成,来驱动电机。
(8)3D打印外壳
作用:根据所选的元器件,设计机器人关键客体并3D打印出来,固定机器人各关节相关部件
(9)其他辅料
作用:使机器人各个部件衔接起来,协助完成机器人动作
创意名称
机器人手部闭环电机夹爪
项目简介
面向机器人末端抓取场景,设计一款高集成、低功耗的闭环步进驱动夹爪。以 MPS 传感与电源芯片为核心,实现高精度的抓取力度与位置控制,大幅降低系统待机功耗。
系统方案
电源单元: 采用 MPM54304 电源模块,提供高集成度的四路(3A/3A/2A/2A)稳压供电。利用其 I2C 与 MTP 功能灵活配置输出,极致压缩 PCB 空间。
驱动单元: 采用步进驱动结合闭环算法,有效解决传统步进电机易失步、共振等问题,为夹爪输出平稳的大扭矩。
传感闭环: 采用 MA782 超小磁角度传感器提供高精度绝对位置反馈。
主控与保护: MCU 负责闭环 PID 运算,并集成堵转检测(用于判断是否夹紧物体)与防夹伤保护机制,确保交互安全。
选用物料
MA782 ×5
MPM54304 ×5
项目简介
基于MPS高精度传感的AI作业批改机械臂系统
【说明】
构建一个基于视觉定位的桌面作业批改系统,在AI视觉的驱动下,自动完成批改任务。系统以树莓派4B作为主控,连接摄像头,自动识别作业本上的题目位置与手写答案,并驱动三轴机械臂在对应位置进行打钩(√)或打叉(×)的批改绘制。该系统可识别作业本是否被意外移动或翻页,并实时调整机械臂轨迹。其中,电源子板采用MP2797管理2-3串18650电池,为整个系统提供稳定的动力。关节驱动采用MP6540H控制多路微型直流有刷电机(或舵机)作为机械臂关节的主驱动力,MP1918驱动NMOS管控制末端夹笔执行器的开合动作,MCS1805采集各关节电机回路电流,实现过载保护与力反馈。主控板采用MP4583为树莓派4B及传感器网络产生3.3V核心电压,并在每个关节(或在关键末端关节)连接MA600A高精度角度传感器,实时跟踪关节绝对转角,实现高精度的全闭环位置控制。软件系统采用Ubuntu 20.04与OpenVINO框架实现上述视觉识别、轨迹规划与实时闭环控制算法。
选用物料
MP2797 ×5,MP6540 ×5,MP1918 ×5,MP4583 ×5,MCS1805×5,MA600A×5
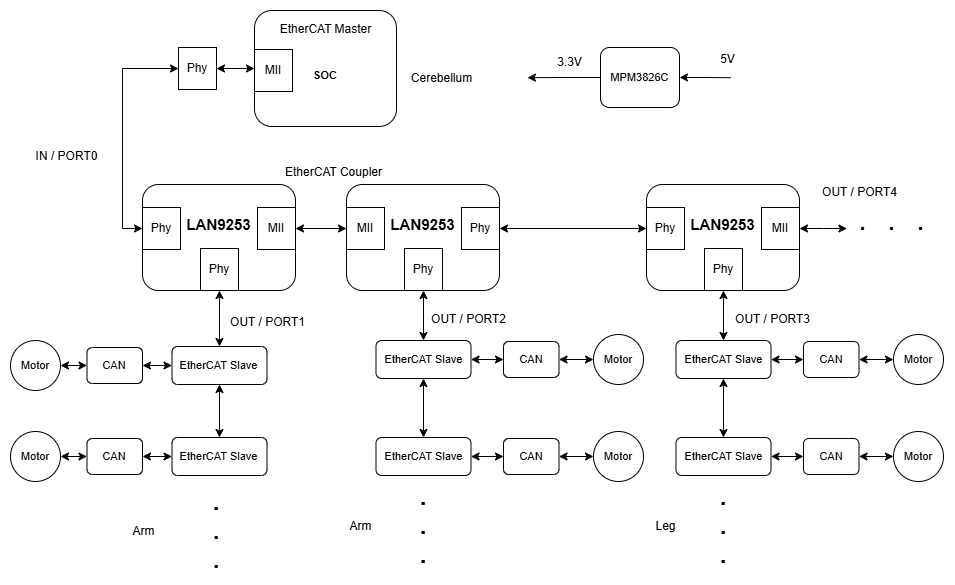
创意名称
机器人EtherCAT分支器
项目背景
通信模块是机器人身上的重要组成部分之一,通信模块直接影响着其它模块的协同工作,市面上采用主流的通信协议包括EtherCAT、CAN、T1S等,而可靠的电源方案能降低各模块断连的概率。
项目简介
机器人EtherCAT分支器是面向机器人EtherCAT有线网络应用,能将“逻辑上的级联”转换成“物理上的分支”结构,简化模块见的布线,实现机器人小脑EtherCAT主站对各个关节EtherCAT级联从站的时钟同步控制,采用MPS高集成度的小体积电源模块,实现对通信系统高可靠性的供电。
系统方案
系统方案的框图如下所示:
通信单元:
采用LAN9253设计EtherCAT Slave分支器,在逻辑上仍然是级联结构,但是物理上是分支结构,方便机器人内部各个关节之间的布线,将EtherCAT Master下发的指令一次转发给各个执行模块,实现超低延时的时钟同步控制。
电源单元:
使用MPS电源芯片MPM3826C给LAN9253供电,同时MPM3826C的高集成度特性,也方便设计小体积的PCB板塞入到各个关节之中。
选用物料
一、创意名称:智能家庭陪伴与辅助机器人
二、应用场景:为家庭提供日常辅助,如物品搬运、环境监控、老人陪伴、远程探视等。
核心:人机交互:配备语音识别、人脸识别和情感交互功能,能与家庭成员进行自然交流。
AI辅助:
语音与视觉识别:AI处理语音指令和摄像头画面,理解用户需求(如“把水杯拿过来”、“看看宝宝在干嘛”)。
行为学习与预测:AI学习家庭成员的生活习惯,主动提供提醒或服务(如提醒吃药、在特定时间打开空气净化器)。
安全监控:监测家中异常情况(如燃气泄漏、陌生人闯入)并及时报警。
三、实物验证:制作一个具备基本移动、语音交互和简单抓取功能的桌面级或小型地面机器人模型。
计划选择4轮麦克纳姆轮驱动+4自由度舵机/电机驱动机械臂抓手
四、芯片应用方案(易于手工制作):
电池与电源管理 (Battery & Power Management):
电池监控:MP2797 (TQFP-48, 7mmx7mm) 确保机器人长时间待机和使用时的电池安全。
系统供电:MP4583 (QFN-19, 3mmx5mm) 为主板、电机等提供稳定电源。
核心逻辑供电:采用 MP4583 + LDO (如AMS1117-3.3) 的方案,为AI芯片、麦克风阵列、摄像头、显示屏等提供多路电源。
运动控制 (Motion Control):
平稳驱动:MP6543 (QFN-24, 3mmx4mm) 驱动小型机器人的直流电机,实现平稳移动。QFN-24封装尺寸适中,易于焊接。
电流保护:MCS1805 (SOIC-8) 监测电机电流,防止夹手或卡住时损坏。
精确转向:MA730 (QFN-16, 3mmx3mm) 提供轮子或舵机的角度反馈,实现精确的转向和定位。
对外接口与通信 (External Interface & Communication):
USB-C 充电与数据:MP4201 (QFN-32, 5mmx6mm) 和 MP5038 (QFN-20, 4mmx4mm) 组合,实现通过USB-C接口快速充电和数据传输。
端口保护:MP4501 (TQFN-20, 3mmx3mm) 保护USB-C端口。
五、物料计划
1、大赛申请物料:
芯片型号 数量 用途备注
MP2797 1 电池管理核心
MPQ4589-AEC1 1 主电源降压
MP5038 1 快充协议
MP4501 1 接口保护
MP6540H 4 4个麦克纳姆轮驱动
MCS1805 4 4个电机电流检测
MA730 4 4个电机角度反馈
2、自备物料
麦克纳姆轮 4 实现基本移动,含前进、后退、左转、右转、左圈、右圈、左移、右移等
麦克轮电机 4 N20减速电机
机械臂舵机 4 SG90舵机(简易模型,验证功能)
INMP441 1 I2S麦克风
MAX98357 1 I2S扬声器(带扬声器)
0.96OLED 1 SS1306驱动128*64
主控核心开发板 1 Maker-ESP32-Pro(待定)
一、创意名称:基于MPS芯片的高集成度的驱控一体关节模组
二、应用 场景:设计一款高功率密度的手术机器人器械操作驱动板,完成电机的三环闭环控制,能提供高功率及底发热的驱动板模块;
三、实物验证:结合公司内部的手术器械,平替原来的驱动器,测量实际的器械输出力矩及转速‘
四、申请物料:MPM3519 /10PCS;MA600A/10PCS;MCS1806/15PCS;MP6540H/5PCS
五、自备物料:STM32H743IIK6,手术机器人机械臂及其器械及工控机。
创意名称
AI 玩具机器人智能关节驱动模块
项目简介
面向 AI 玩具机器人(如互动头部、仿生手臂、桌面级陪伴机器人)的关节驱动需求,设计一款小型化、低功耗、高精度的单关节闭环驱动模块。以 MPS 电源、驱动、传感芯片为核心,构建适用于玩具级别无刷电机的伺服控制单元,实现位置闭环与速度闭环。模块具备体积紧凑、运行静音、待机功耗低等特点,可直接嵌入玩具头部俯仰、肩肘屈伸等关节,提升动作细腻度与交互自然性。
系统方案
电源单元
采用 MP4583 实现 7.4–24V 宽电压输入(兼容 2S/3S 锂电池),为后级驱动电路与主控系统提供稳定低压供电,效率高、纹波小。芯片 8μA 静态电流特别适合玩具待机唤醒场景,支持长时间续航。
驱动单元
以 MP6540H 三相集成驱动芯片为核心,内置功率桥与电流采样电路,简化外围硬件设计,支持 FOC 矢量控制。驱动小型无刷电机时平稳、静音,满足 AI 玩具反复启停、轻载抓握等动态交互需求。
传感与闭环控制
使用 MA600A 磁角度传感器实时采集电机转子角度,实现 0.1° 级别的位置反馈,构成速度环 + 位置环双闭环控制系统。有效抑制低速爬行时的抖动,保证玩具关节定位重复性好、动作柔顺。
主控与保护
以通用 MCU(如 ESP32-S3 或树莓派 Pico)实现算法调度与逻辑控制,集成过流、过压、堵转等硬件保护机制。确保玩具在儿童操作或意外碰撞时自动限流停机,提升安全性。
选用物料
MP6540H ×3(头部俯仰 + 左右肩肘)
MA600A ×3
MP4583 ×1(单颗可为 3 个关节统一供电)
创意名称:
基于多路电源管理与电流监测的智能小车模块设计
所选物料型号及数量:
MPM54304 ×1
MCS1805 ×2
创意说明:
本项目设计一个面向智能小车的模块化电源与电流监测系统。系统以 MPM54304 多路电源模块为核心,为主控单元(如 Arduino)、电机驱动模块及传感器模块提供多路稳定供电,满足不同负载对电压、电流的需求。同时,引入 MCS1805 电流传感器对电机工作电流进行实时采集,实现对系统运行状态的监测与分析。
项目简介基于MPS高精度传感的AI作业批改机械臂系统
【说明】
用于检测机械臂角度,同时可以进入低功耗模式,进行应力反应,当有人搬动机械臂时,机械臂做出相应的反应。
分为主动检测与被动检测,主动检测反馈当前的角度,被动检测,检测是否有外力控制机械臂。
选用物料
MA600A ×5,MA782 ×5
初来乍到向大佬学习
创意名称:面向小型机械臂关节的角度感知与安全限位模块
所选物料:MA730 数字磁角度传感器 × 1
创意简介:本项目计划设计一个适用于小型机械臂关节的位置感知与安全限位模块。系统使用 MA730 非接触式数字磁角度传感器采集关节旋转角度,由主控读取角度数据并进行角度映射、阈值判断和异常检测。当关节角度超出预设安全范围时,模块通过 LED、蜂鸣器或串口提示实现限位保护。该模块可作为机械臂、云台或移动机器人转向机构中的独立运动控制子模块。
创意名称:多路输出数字电源
选用芯片:MPM54304
项目简介:通过**MPM54304这块多路DC电源控制模块,我打算制作一个可以多路输出的电源模块,平时测试时经常需要提供不同电平的电源给到设备使用,但是往往手边只有一个大的可调电源,通过这个变换器可以同时输出多路的优势,我们可以同时给多个模块供电,同时也可以利用它可以并联输出的优势,在特定条件下输出更大的功率。**
创意名称:低功耗自适应智能外骨骼柔性关节
应用场景:医疗康复外骨骼、工业助力外骨骼、单兵负重装备。
外骨骼机器人需要长时间穿戴,对系统的续航能力、重量和安全性要求极高。本方案设计一款集成了电池管理、高效驱动和智能唤醒机制的外骨骼关节模块。该模块在用户静止时进入超低功耗待机状态,当检测到运动意图时迅速唤醒;同时在下坡或减速时,能够将电机的制动能量回收至电池,显著提升续航表现。(这次比赛主要想验证动能回收方案,为后续设计做技术储备)
电池与电源:
运动控制:
1.超长续航:通过MA782的硬件级运动唤醒机制和MP4201的双向能量回收技术,最大限度地降低无效功耗并回收动能。
2.高安全性:采用MP2797构建车规级标准的电池管理系统,结合硬件级过流、过压保护,为穿戴式设备提供最高级别的安全保障。
物料数量:
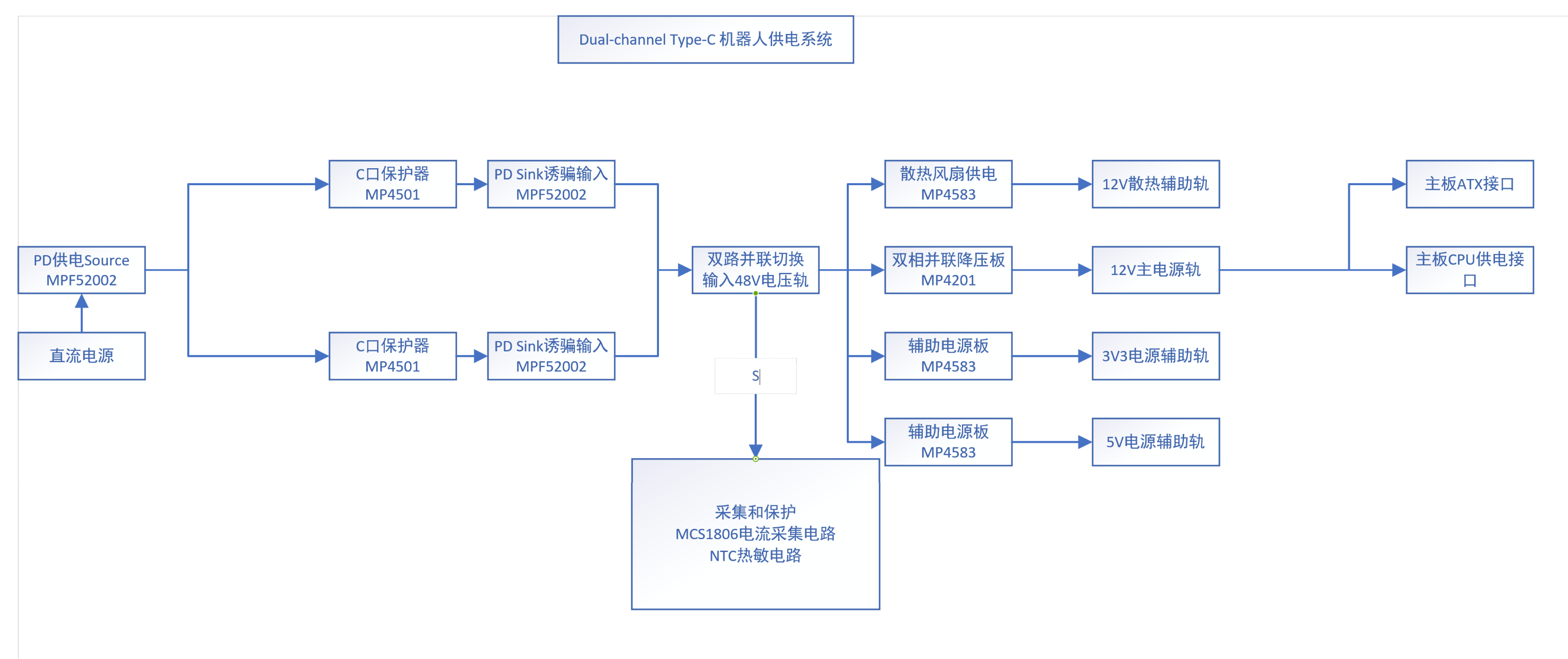
Dual-channel Type-C 机器人供电系统
一、项目核心
本项目针对机器人主控NUC、ITX工控机的供电需求,以 48V 为主母线,双 C 口兼容海量家用 PD 快充头,无需定制专用电源,大幅降低机器人用户使用门槛与成本;全方案采用 MPS 大赛指定物料,符合 ATX 主板供电规范,打造高可靠、智能化的机器人专用电源系统。
二、核心亮点
通用化创新:双 C 口兼容家用 PD 快充头,用户无需额外购置专用电源,使用成本极致优化
高效低发热:MP4201 多相交错并联方案,降低单芯片发热与输出纹波,适配 NUC 高负载长时间运行
全独立电源轨:12V 主轨、5V/3.3V 辅助轨、风扇供电直连 48V 母线,互不挤占功率余量,工况适配性强
全链路智能管控:蓝牙 MCU 通过 I2C 管控全链路电源,支持无线调参、OTA 升级,适配机器人运维场景
三、核心硬件选型(全大赛指定 MPS 物料)
功能模块 核心物料
双 C 口 PD 协议与保护——MPF52002、MP4501
12V NUC 主供电——MP4201(双相 / 四相级联)
5V/3.3V 主板供电 + 风扇供电——MP4583(3 路独立)
电流采集与保护——MCS1806 霍尔电流传感器
Dual-channel Type-C拓扑图
应用场景:工业仓储物流AGV、高端服务机器人底盘、ROS开源教育平台。
移动机器人底盘是各类服务机器人的基础。本方案旨在设计一款模块化、易于扩展且具备工业级通信能力的全向移动底盘。在通信架构上,底盘主控板作为 EtherCAT Master(主站),通过高实时性的EtherCAT总线对四个独立的麦克纳姆轮驱动模块(从站)进行微秒级同步协同控制;同时,主控板支持 Modbus TCP/IP 协议,方便与工业现场的PLC、SCADA系统或上位机(如ROS系统)进行标准化的数据交互。特别地,该底盘引入了消费级电子中普及的USB PD快充技术,使得机器人可以使用常见的Type-C充电器进行快速补能,极大提高了使用的便利性。
•电池与快充接口:
•运动控制:
为了完成该方案的实物验证,您还需要自备以下物料:
•底盘主控板(EtherCAT Master):
使用搭载 Linux PREEMPT_RT 实时内核的嵌入式计算平台(RK3576的开发板,已有了),板载双千兆网口。运行开源的 SOEM (Simple Open EtherCAT Master) 或 IgH EtherCAT Master 协议栈实现高实时性主站控制,并运行Modbus TCP Server服务对接上位机。
•轮毂驱动板(EtherCAT Slave):
3套独立的电机驱动板,每块板需集成EtherCAT从站控制器芯片(如 Microchip LAN9252 或 Beckhoff ET1100)和MCU(如STM32G4),负责解析EtherCAT报文并控制MPS的功率级芯片。
•执行机构:
3个带减速箱的无刷直流电机(BLDC),额定电压12V,用于驱动麦克纳姆轮。
•机械结构:
3个麦克纳姆轮、底盘车架(亚克力或铝合金板)、电机安装支架。
•动力电池组:
3串(11.1V)或4串(14.8V)锂电池组,作为底盘的主电源。
•其他电子元器件:
Type-C母座接口、PCB板、标准工业网线(用于EtherCAT菊花链连接)。为拓展后续小车上的机械臂
1.工业级实时通信架构:采用EtherCAT总线替代传统的CAN/RS485,实现了四个麦克纳姆轮的微秒级硬实时同步控制,大幅提升了全向移动底盘的运动精度和轨迹跟踪能力。
2.IT与OT的无缝融合:底盘同时支持Modbus TCP/IP协议,既能作为工业自动化网络中的标准节点被PLC直接调度,又能轻松接入ROS等IT生态系统,应用场景极其广泛。
3.通用快充生态:引入USB PD协议和Type-C接口,打破了传统机器人专用充电器的限制,提升了产品的通用性和用户体验。
4.高可靠电源树:利用MPM54304多路电源模块,简化了主控板的电源设计,提高了系统的抗干扰能力和稳定性。
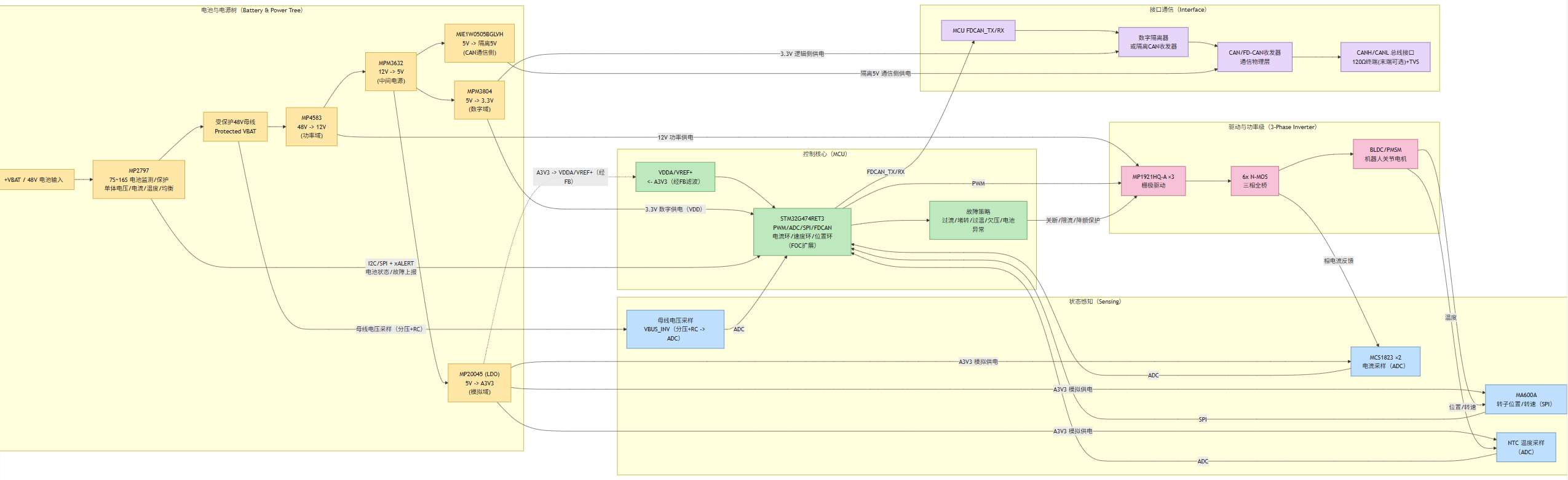
创意名称:面向智能配送与分拣机械臂的关节智能驱动与感知一体化模块
应用场景:针对工厂中多类零件识别、抓取、搬运和精准码放需求,模块为机械臂关节提供稳定驱动、位置闭环、负载感知与异常保护能力,支撑机器人完成零件分类、收纳与回收全流程任务。
必备物料:MP4583;MA600A;MP2797。
方案简介
智能配送与分拣任务要求机器人完成工件识别后的抓取、搬运、定位和精准码放。机械臂关节作为执行链路的核心,其低速稳定性、位置精度、负载感知能力和通信可靠性,直接影响工件是否能稳定夹取、准确投放以及避免掉落和碰撞。本方案设计一款面向机械臂关节的智能驱动与感知一体化模块,集成三相电机驱动、电流检测、磁编码位置反馈、温度监测、母线电压采样和CAN/FD-CAN通信接口。模块采用基于磁编码器反馈的有感驱动结构,可支持电流环、速度环、位置环及FOC控制扩展,适用于机械臂在分拣任务中的低速定位、柔性抓取和重复码放动作。模块还通过电流、位置、温度、母线电压等多源状态感知,对堵转、过载、过温、欠压等异常状态进行基础识别与保护,并通过CAN/FD-CAN与机器人主控进行状态上报、参数配置和运动指令交互,形成适合分布式机械臂关节控制的执行节点。由于机械臂关节模块采用48V电池供电,系统前端引入电池监测与保护能力,对电池单体电压、整包电压、充放电电流及电池温度进行监测,为后级驱动与控制电路提供受保护的VBAT母线,提升电池供电场景下的安全性和可靠性。
功能设计
电池监测与保护:
MP2797 用于48V电池包前端监测与保护,为系统提供电池状态评估、故障上报和供电安全保护。
电源管理:
MP4583 用作前级降压,将48V输入转换为12V,为三相驱动与功率级提供供电基础。
MPM3632 将12V进一步降压至5V,作为系统中间电源。
MPM3804 将5V转换为3.3V,为MCU和数字控制电路供电。
MP20045 由5V生成低噪声A3V3模拟电源,供电流检测、位置检测以及MCU模拟电源端使用,降低开关纹波对ADC采样精度的影响。
MIE1W0505BGLVH 将主5V转换为隔离5V,用于CAN通信隔离侧供电,降低电机驱动噪声和地电位差对通信链路的影响。
运动驱动:
MP1921HQ-A 高低侧栅极驱动器配合6个N沟道MOSFET构建三相全桥逆变器,实现BLDC/PMSM关节电机驱动。MCU输出PWM信号控制三相桥臂,为换相、调速、电流环控制和FOC扩展提供硬件基础。
电流检测:
MCS1823GQTE-320BRN 用于电机电流实时采样,支持双向电流检测,带宽可达120kHz,并集成过流检测(/OCD)功能。电流信息既可用于闭环控制,也可辅助判断抓取负载变化、堵转、碰撞和过载状态。
位置反馈:
MA600A 磁编码器用于采集电机转子位置与转速,支持SPI/SSI以及ABZ、UVW、PWM等输出方式。其位置反馈能力适合机械臂关节的低速稳定控制、重复定位和精准码放任务。
控制与通信:
主控采用STM32G474RET3,负责PWM输出、ADC采样、SPI位置读取、故障处理和CAN/FD-CAN通信。通信链路用于接收机器人主控的运动指令,并上传关节位置、电流、温度、母线电压和故障状态。
技术亮点
1.面向智能分拣任务的关节执行模块:模块直接服务于工件抓取、搬运和码放动作,重点提升机械臂低速稳定性、重复定位精度和动作可靠性。
2.驱动与感知一体化设计:将三相驱动、电流检测、位置反馈、温度监测和母线电压采样集成到同一关节模块中,使关节从单纯执行器升级为可感知、可诊断的智能节点。
3.多源状态融合保护:通过电流、位置、温度和母线电压信息,可识别堵转、过载、过温、欠压等异常情况,降低分拣过程中工件掉落、误放和碰撞风险。
4.紧凑型模块化架构:采用小封装电源、驱动和传感器器件,便于集成进自研一体化关节模组,也方便后续扩展到桌面机械臂、轮式机器人机械臂或末端执行机构。
系统框图
物料数量
申请物料:
MP2797 x2
MP4583 ×2
MA600A ×2
自备物料:
MPM3632 ×1
MPM3804 ×1
MP20045 ×1
MIE1W0505BGLVH ×1
MP1921HQ-A ×3
MCS1823GQTE-320BRN ×2
N沟道MOSFET ×6
STM32G474RET3 ×1
CAN/FD-CAN收发器 ×1
数字隔离器或隔离CAN收发器 ×1
电压分压电阻及外围阻容器件 ×若干
创意名称
基于MCS1805的高精度隔离式双向电流监测仪(支持USB上位机分析)
所选物料型号及数量
芯片型号: MCS1805GS-305-B
数量: 5片
评估板EVCS1805-S-00A :1块,用于做板前调试验证
创意说明与项目描述(核心部分)
【项目背景与应用场景】
在机器人关节模组、电池管理系统(BMS)及精密电机控制中,电流的精确监测是实现力控、过载保护和能效分析的基础。传统的采样电阻方案缺乏电气隔离,易受共模干扰影响。本项目旨在设计一款高精度、高隔离度的双向直流电流监测仪,专为机器人伺服驱动或电源测试场景打造。
【核心设计思路】
本项目以 单片机 为核心控制器,利用 MPS MCS1805 隔离式霍尔电流传感器 作为前端感知单元。
隔离感知: 利用MCS1805的3kVRMS隔离耐压特性,将大电流回路(一次侧)与逻辑控制回路(二次侧)完全隔离,彻底消除地线环路干扰,确保在电机启停瞬间的采样安全与准确。
双向检测: 针对机器人电机正反转及电池充放电场景,设计信号调理电路,实现 ±5A 范围内的双向电流线性检测。
智能交互: 集成显示屏实时显示电流波形与数值,并通过USB转串口与上位机通讯,实现数据的实时记录与分析。
【关键技术指标】
检测范围: -5A ~ +5A(双向直流/交流)
测量精度: 目标误差 < ±1.5%(通过软件校准)
隔离电压: 580VRMS 工作电压 / 3kVRMS 隔离耐压
通讯接口: USB Type-C (虚拟串口),波特率可配
响应速度: 传感器带宽 > 120kHz,满足快速动态响应需求
【系统架构与功能实现】
信号采集层: 电流流经MCS1805,输出与电流成正比的模拟电压信号。单片机内部高速ADC进行采样,采用过采样与数字滤波算法(如卡尔曼滤波)去除高频噪声,提高信噪比。
数据处理层: 单片机对ADC数据进行标度变换,计算出实时电流值、峰值及有效值。
人机交互层:
本地显示: 屏幕实时刷新电流数值及简易趋势图。
按键控制: 设置“清零/校准”键(消除零点漂移)和“阈值设置”键。
上位机通讯: 通过USB转串口芯片连接PC,使用串口助手或自研上位机软件绘制实时电流曲线,便于分析电机启动冲击电流。
电源管理: 采用独立电源设计,确保一次侧与二次侧电源隔离,发挥MCS1805的最大隔离优势。
【创新点与优势】
高安全性: 相比传统分流器方案,MCS1805提供的电气隔离能有效防止高压侧故障损坏后端昂贵的单片机控制器,特别适合机器人高压电池包监测。
低插入损耗: 传感器内阻极低(mΩ级),在大电流检测时自身发热极小,不影响被测电路效率。
算法补偿: 软件层面加入温度漂移补偿算法和零点自动校准功能,解决霍尔传感器常见的温漂问题。
【预期成果】
完成PCB设计与焊接,制作出紧凑的电流监测模块。
编写单片机驱动程序,实现高精度ADC采集与USB数据透传。
提供上位机波形显示演示,验证±5A范围内的线性度与响应速度。
基于MPS高精度芯片的智能安全一体化关节模组
一、设计背景
协作机器人和服务机器人的关节,正朝着高精度力控、硬件级安全和小型化模组的方向发展。本项目利用角度感知、电流检测和功率驱动方面的先进芯片,设计一款集成度高、具备硬件级主动安全能力、并能实现高精度力矩控制的旋转关节模组。
二、核心任务
使用 MA600A、MCS1805、MPQ6547A 三款核心芯片,设计并制作一个完整的机器人旋转关节模组,并使其在应用中呈现控制精度与安全智能。
三、具体设计要求
1.模组硬件集成
传感器布局:
MA600A 安装在电机后端或输出轴端,实现对转子位置的精确测量。尝试将系统角度精度优化到 <0.1°。
MCS1805 串联在MPQ6547A的电源回路或相电流回路中,实现对电机力矩电流的精确采样,并利用其OCD功能设计硬件级保护电路。
2.电机控制与功能实现
基本运动控制:基于磁编码器反馈,运行 FOC(磁场定向控制) 算法,实现位置、速度、力矩(电流)三种闭环模式。
硬件级安全保护(关键发挥项):
将 MCS1805的OCD输出直接连至MCU的硬件中断或MPQ6547A的使能引脚,设计成独立于主程序的中断保护回路。当发生机械碰撞或堵转时,必须在毫秒级内切断电机输出,并保持报警状态。
对比演示:软件过流保护(百毫秒级)与硬件OCD保护(微秒级)在碰撞时的反应差异。
四、物料说明
MA600A 高精度磁角度传感器*10
MCS1805 带OCD的隔离霍尔电流传感器*10
MPQ6547A-AEC1 三相车规级功率级*10
自备物料:高性能MCUSTM32系列、电机、磁铁、电源模块等。
创意名称:
基于MPQ6547A与MA900的桌面级六轴机械臂关节运动控制模块
所选物料型号及数量:
| 芯片型号 | 申请数量 | 用途说明 |
|---|---|---|
| MPQ6547AGLE-AEC1 | 6颗 | 6个关节的BLDC电机FOC驱动核心 |
| MA900GQE | 6颗 | 14位绝对式磁编码器,关节位置高精度反馈 |
方案简介(应用场景、方案亮点、核心技术):
1. 应用场景:低成本桌面教育机械臂
本方案瞄准教育科研、创客DIY场景下的六轴桌面机械臂。市面现有方案要么采用舵机(精度低、无闭环),要么使用工业伺服(成本过高)。本方案旨在打造一款基于FOC控制、全闭环的高性价比六轴机械臂核心关节模块,兼顾精度与可复刻性,适合ROS开发学习、轻量级自动化实验。
2. 方案亮点(紧扣大赛聚焦“机器人模块设计”)
单关节独立闭环设计:每个关节作为一个独立模块,集成MPQ6547A驱动、MA900位置反馈、2804无刷电机,通过CAN总线与主控通信,实现分布式、可扩展的模块化架构。
零归零启动:MA900为14位绝对式磁编码器,上电即知绝对位置,无需每次启动做归零校准,大幅提升桌面机械臂的使用便利性。
超低噪声FOC驱动:采用SimpleFOC开源库实现磁场定向控制,结合MPQ6547A内部集成的低Rdson MOSFET(高边60mΩ,低边50mΩ),实现平滑静音、高效率的关节运动。
完整复刻路径:已有MPS官方社区发布的《MPQ6547A + MA900 + Arduino FOC电机控制》完整教程作为技术验证基础【参考帖topic/6777】,方案可行性有保障。
3. 技术方案与BOM清单
电子系统设计:
主控:STM32G474或ESP32(支持CAN总线),1颗作为中央控制器,负责逆运动学解算和轨迹规划。
关节驱动芯片:MPQ6547AGLE-AEC1 ×6,4V-32V宽电压输入,峰值电流5.5A,集成三相半桥MOSFET,直接驱动2804电机。
位置传感器:MA900GQE ×6,14位绝对式磁编码器,支持SPI通信,具有杂散磁场抗扰能力的全差分设计。
通信总线:CAN/RS-485总线,实现主控与6个关节的实时指令传输。
机械结构BOM(自备):
2804无刷电机 ×6(额定扭矩300g·cm,需配减速器)
行星减速器/3D打印谐波减速器 ×6(推荐减速比≥30:1)
3D打印结构件(参考开源项目HELENE、Annin Robotics AR4进行适配改造)
12V/15A大功率开关电源 ×1
4. 实施计划(预估)
| 阶段 | 时间 | 核心任务 | 交付物 |
|---|---|---|---|
| 第1阶段 | 第1-3周 | 单关节原型搭建:完成1颗MPQ6547A+1颗MA900+1台2804电机的FOC角度闭环控制 | 单关节FOC控制视频、核心代码 |
| 第2阶段 | 第4-5周 | 双关节联调:搭建第2个关节,验证CAN总线通信与双电机协同(画圆/直线轨迹) | 双关节协同演示视频 |
| 第3阶段 | 第6-7周 | 六轴系统集成:装配6个关节结构件,部署IK算法,实现全关节闭环与基本轨迹 | 六轴机械臂原型机动静展示 |
| 第4阶段 | 第8周 | 系统优化与文档整理:标定零点、精调PID,拍摄演示视频,编写项目文档 | 完整项目报告、开源工程包 |