1. 创意名称: 基于 MP4201 的机器人末端“极客能量站”——高功率可调电源与 PD 快充集成模块
2. 项目简介: 本项目设计一款集成于机器人肢体末端的供电模块。针对生活助理机器人或科研机器人的应用场景,该模块不仅能为手机、笔记本等移动设备提供大功率快充,更能作为一个“随动机动”的可调电源平台。 其核心价值在于利用机器人的移动性,在野外、展会或实验室等各种非固定场景下,为极客开发者提供一个从 3V 到母线电压范围内的可调电源输出接口,方便在空间任意位置驱动、调试各类电子外设。
3. 系统方案:
-
拓扑结构: 采用 MP4201 作为四管升降压(Buck-Boost)主控,适配机器人内部 24V-48V 动力电池输入。利用其 100V 的高耐压特性,确保在电机频繁启停导致的电压浪涌环境下,输出端仍能保持高线性度。
-
协议与控制: * 搭载 MP5038 作为 PD 协议控制器,实现对主流手机、笔记本快充协议的硬件级握手。
- 预留 I2C 接口,通过主控调节 MP4201 的反馈网络,实现输出电压/电流的精确数字化调节,满足极客对“可调电源”的参数需求。
-
端口防护: 输出端接入 MP4501,提供针对机器人末端复杂外插拔环境的 ESD 及超压保护,防止因误操作损坏机器人主母线或被供电设备。
4. 选用物料:
创意名称:跟随旋转手臂
参赛物料:**MA782,**MA600A ,MP6540H芯片各10pcs
创意设计:基于MA782,MA600A ,MA730,实现手臂的旋转角度检测,并控制电机转动,跟随人体旋转对应角度
控制模块:
主控mcu,使用esp32-s3;使用MP6540H芯片控制步进电机旋转,实现电机的精准角度移动。
想给手办弄总线舵机
创意构思逻辑
总线式智能关节模组,就是想做一个能直接塞进手办或者微型机器人关节里的“模块化舵机”。市面上绝大多数舵机靠PWM线一对一控制,线多了就像海草一样乱。而我的方案让他走总线(RS-485或单总线UART),用一条线串起所有关节,主控发一条指令,舵机自己就知道该转到哪。还能把角度、电流、温度实时回传,手办被推的时候能自己“做反应”,技术上更有含金量。
MP6543的技术参数也非常契合手办级微型舵机的需求:工作电压3-12V,持续输出电流2A,QFN-24封装的体积大约只有3×4mm,非常适合微型关节的PCB布局。MPS官方资料也特别推荐了“MP6543搭配MA600A”这套组合来验证电机控制和FOC算法,意味着这套芯片配对所代表的技术路线已经有官方的完整支撑,调试时少走不少弯路。MP6540H(5A持续电流)则作为功率扩展的备选方案,方便后期根据不同手办的负重需求灵活切换。
外形设计准备走“单PCB集成”路线,把MP6543、主控MCU、MA600A磁编码器都放在同一块小板子上,直接扣在微型无刷电机后面。配合3D打印的外壳,整体厚度控制在12-15mm以内,能塞进手办胸腹或四肢关节里。
物料选型说明
| 物料 |
数量 |
选型理由 |
| MP6543 |
2颗 |
集成三相功率级+电流采样+过流保护,QFN-24封装3×4mm,工作电压3-12V覆盖微型无刷电机需求,外置元件极少 |
| MA600A |
2颗 |
TMR磁角度传感器,精度达0.1°,支持SPI/ABZ/PWM多接口,离轴安装可兼容现有机械结构 |
| MP6540(备选) |
2颗 |
5A持续电流,功率扩展方案,根据手办负重需求灵活切换 |
面向高阶机器人的“驱控-电源-监测”一体化智能微型关节模组
一、项目描述
1. 行业痛点与项目定位
在四足机器人、人形机器人及工业AGV等领域,传统关节系统普遍存在体积大、抗干扰能力差、可靠性低等问题。当前主流方案通常将主控集中在机身,关节仅作为执行单元,电机驱动、电源管理及编码器信号均需通过长线束连接,这种架构不仅导致电磁干扰(EMI)严重,而且在长期运动中线束容易疲劳损坏,同时也显著增加了系统布线复杂度和维护成本,限制了系统扩展性。
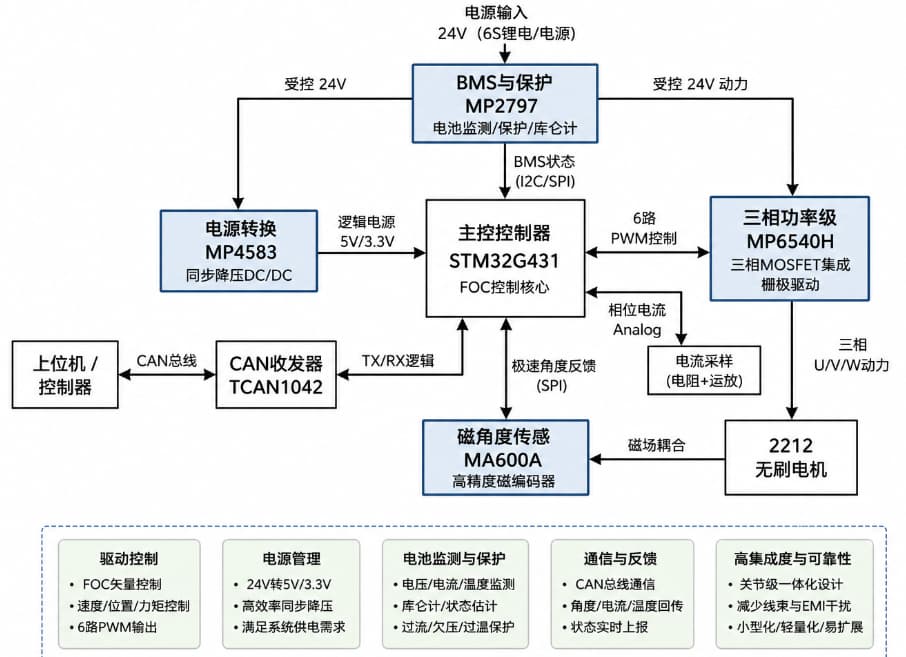
本项目提出一种关节级一体化解决方案,将FOC电机驱动、电源转换、电池监测与保护以及通信功能高度集成于单块PCBA中,并直接部署于电机尾部。系统通过单路电源线与CAN总线即可完成供电与通信,实现“盲插式”的分布式控制架构,从而显著提升系统可靠性与可维护性,并满足高阶机器人对小型化、轻量化和高性能的需求。
2. 核心技术实现路径
本系统以STM32G431为核心控制器,运行FOC(磁场定向控制)算法,实现对三相无刷电机的高精度力矩、速度和位置控制。转子位置检测采用MA600A高精度磁编码器,安装于电机尾部,通过SPI接口实时输出绝对角度信息,支持上电即用,无需回零校准,显著提高系统响应速度与控制精度。
在功率驱动部分,选用MP6540H三相功率级芯片,该器件内部集成三相MOSFET及栅极驱动电路,支持PWM输入控制并具备过流保护功能,有效降低功率电路设计复杂度,提高系统可靠性。
电源部分由24V(6S锂电)直接输入,通过MP2797进行电池电压、电流及温度的实时监测,并提供库仑计功能用于能量统计,同时具备高边保护能力,在异常情况下可快速切断电源。之后通过MP4583高效同步降压芯片将电压转换为5V及3.3V,为MCU、传感器及通信模块供电。
系统通信采用CAN总线,通过TCAN1042收发器实现与上位机的双向数据交互,支持多关节级联。系统运行过程中可实时回传角度、电流、温度及功耗等状态信息,便于上层进行状态监控与能量管理。
3. 切实可行性说明
本方案所选核心器件均为成熟工业级产品,具备完善的技术资料与开发支持,硬件实现风险较低。控制算法基于STM32官方Motor Control SDK或开源SimpleFOC库,可在G4系列平台快速实现FOC闭环控制,避免从底层开发算法,从而缩短开发周期。
在硬件实现上,通过采用高度集成的MP6540H三相功率级及MP4583电源芯片,大幅减少外围器件数量,降低PCB设计复杂度,提高首板成功率。系统开发采用模块化调试方式,按“电源→驱动→传感→控制→通信”逐步验证,预计通过2~3次PCB迭代即可完成稳定样机。在赛期内可以完成从样机调试到演示系统搭建的完整闭环。
二、物料清单
【大赛必用物料】
| 类别 |
型号 |
功能 |
数量 |
| 电池监测 |
MP2797 |
电池监测与保护,库仑计 |
3 |
| 电源管理 |
MP4583 |
100V 3A 同步降压DC/DC |
3 |
| 角度传感 |
MA600A |
高精度磁编码器 |
3 |
| 电机驱动 |
MP6540H |
三相功率级(集成MOS) |
3 |
【个人自备物料】
| 类别 |
型号 |
功能 |
封装 |
数量 |
| 主控芯片 |
STM32G431CBU6 |
ARM Cortex-M4,FOC控制 |
UFQFPN-48 |
1 |
| 通信芯片 |
TCAN1042 |
CAN收发器 |
SOIC-8 |
1 |
| 执行机构 |
2212无刷电机 |
三相无刷电机 |
— |
1 |
| 磁铁 |
径向充磁磁铁 |
配合MA600A使用 |
— |
1 |
| 电源输入 |
6S锂电池 / 24V电源 |
系统供电 |
— |
1 |
| 电流采样 |
分流电阻 |
电流检测 |
2512 |
2~3 |
| 运算放大器 |
通用运放 |
电流信号调理 |
SOIC-8 |
1~2 |
| LDO |
5V→3.3V |
逻辑供电 |
SOT-223 |
1 |
| 基础器件 |
电阻电容 |
滤波与偏置 |
0402/0603 |
若干 |
| PCB |
定制PCB |
电路载体 |
— |
2~3版 |
三、创新点与优势
本项目的创新点不在于单一功能的突破,而在于围绕机器人关节这一高约束场景,实现“驱动、控制、电源、监测”多功能的系统级深度融合,并针对传统集中式架构在空间、可靠性与布线复杂度上的问题提出可落地的工程化解决方案。首先,在系统架构上,将FOC驱动、电源转换与电池监测全部下沉至关节端,形成标准化智能模组,仅通过电源线与CAN总线即可完成供电与通信,大幅减少线束数量并降低电磁干扰风险,同时显著提升系统可维护性与扩展能力;其次,在实现路径上,选用高度集成的三相功率级芯片MP6540H替代分立MOS方案,有效降低功率电路设计门槛,提高开发成功率,使方案更适合在有限赛期内完成;再次,在能量管理方面,引入MP2797实现单关节级的电流、电压与功耗监测,使每个关节具备独立的状态感知能力,为后续整机能量优化与故障诊断提供数据基础;最后,在结构层面,通过将模组直接布置于电机尾部并结合磁编码器实现紧凑集成,使整个系统具备小型化、模块化与可复制的特点,具备向多关节机器人系统快速扩展的潜力。整体而言,本方案的优势在于“工程闭环完整、集成度高且可复用性强”,能够从实验验证自然过渡到实际应用场景。
四、核心技术指标
本项目围绕关节模组的控制性能、电源效率与系统可靠性三个维度设定关键技术指标。在电气性能方面,系统输入电压范围为18V~26V(适配6S锂电),持续输出电流能力不低于5A,峰值电流可达8A,以满足中小型无刷电机的驱动需求;在控制性能方面,基于FOC算法实现电机闭环控制,结合MA600A磁编码器,其角度测量精度优于0.1°,系统控制频率可达20kHz,从而保证电机运行的平滑性与动态响应能力;在能量管理方面,通过MP2797实现电流与电压的高精度采样,支持单关节功耗统计,测量误差控制在±1%以内,为系统运行状态评估提供可靠依据;在通信性能方面,采用CAN2.0B协议,通信速率最高支持1Mbps,能够满足多关节实时控制需求;在结构与尺寸方面,目标模组直径控制在约45mm以内、厚度约15mm,整体重量不超过35g,以适配紧凑型机器人关节空间;在可靠性方面,系统具备过流、欠压及异常状态检测能力,能够在堵转或冲击工况下提供基础保护与告警。上述指标在保证实现难度可控的前提下,覆盖了机器人关节模组的关键性能要求。
五、预期成果
本项目预期在赛期内完成从原理设计到实物验证的完整工程闭环,形成一个可稳定运行的一体化智能关节模组样机,并具备现场演示能力。具体成果包括:首先,完成至少2~3版PCB设计与迭代,得到一块集成驱动、控制、电源与监测功能的高可靠性PCBA板;其次,实现基于FOC算法的无刷电机闭环控制,能够稳定完成速度控制与位置控制,并具备基础力矩控制能力;同时,实现MA600A角度数据的实时采集与CAN总线通信功能,能够与上位机进行指令交互及状态回传;在能量管理方面,实现MP2797的数据读取,完成电流、电压及功耗的基本监测与显示;最终,搭建完整演示系统(电机+模组+上位机),实现关节的实时控制与状态反馈展示。此外,项目还将输出完整的工程文档,包括原理图、PCB设计文件、核心软件代码及调试说明,为后续扩展到多关节系统或进一步产品化提供基础。整体成果目标不仅是“能运行”,更强调“可复现、可扩展、具备工程参考价值”。
创意:基于 MPM54304 + MPM3519 的机器人主控多路电源模块(“一板供全机”)
所选物料型号及数量:
-
MPM3519(36V/10A 低 EMI 同步降压电源模块)× 1
-
MPM54304(4V–16V 输入,四路 3A/3A/2A/2A 输出,I²C+MTP 电源模块)× 1
-
MP4583(100V/3A 同步降压)× 1
-
MP1918(100V 半桥 GaN/MOSFET 驱动器)× 1(备用扩展)
项目描述: 机器人主控板通常需要 24V 母线 → 12V/5V/3.3V/1.8V/1.2V 多路电源,本项目设计一块"机器人主控供电核心板",只用自备的 ESP32-S3 即可演示与监控,无需电池、电机等高成本器件:
-
一级降压:24V 母线由 MPM3519(36V/10A,集成电感模块,ECLGA-29)一级降至 5V/8A,作为下游所有 LDO/POL 的输入。
-
POL 多路输出:MPM54304(四路独立可编程,I²C 调压 + MTP 存储)从 5V 生成 3.3V / 1.8V / 1.2V / 自定义电压,每路均可由 ESP32-S3 通过 I²C 实时调整电压、读电流、配置软启动顺序。
-
辅助通道:MP4583(100V 输入耐压)作为 24V→12V 风扇/外设辅助通道,演示宽输入范围。
-
MP1918:预留半桥 GaN 驱动接口,便于二期扩展电机预驱或推挽变换器实验。
-
智能监测:ESP32-S3 通过 Wi-Fi 把各路输出电压/电流/温度上传至本地 Web 界面,实现"机器人电源数字孪生",并用大模型分析功耗曲线、自动识别异常负载。
-
保护策略:通过 MPM54304 I²C 配置每路 OCP/OVP 阈值,故障时触发 ESP32-S3 中断 → 关断 + 上报。
预期成果:一块 ≤60×50mm 的"机器人主控电源核心板",支持 24V 输入 / 5 路独立可调输出 / Wi-Fi 监控,整机效率 >90%(5V 满载),开源原理图、PCB、ESP32-S3 固件、Web UI。
自备物料:ESP32-S3、24V/3A 适配器、电子负载或几个大功率电阻
**项目名称:**高精度关节编码器模组
**项目描述:**为小型人形机器人、机械臂设计的一体化关节角度 / 速度 / 位置反馈模组,替代传统光电编码器,实现小型化、高可靠、免维护的关节闭环控制。
项目方案:
核心传感器:MA730
主控芯片:基于 ARM Cortex-M0 的低成本处理器
配套磁体:径向磁化圆柱磁铁(φ3~φ6mm)
辅助电路:LDO、ESD 防护、磁屏蔽环(降低电机磁场干扰)
方案优势:
非接触:不接触无机械磨损
高分辨率:14 位绝对角度,断电重启无需回零,适合机器人关节精确定位。
高速动态适配:支持60000rpm,覆盖机器人关节低速精准与高速响应需求。
多输出兼容:SPI(绝对位置)+ ABZ(速度闭环)+ PWM(简易控制),适配不同主控 / 驱动方案,即插即用。
磁场诊断:检测磁铁脱落 / 位移,故障预警,避免关节失控。
小尺寸:3mm x 3mm,侧装节省轴向空间,适配小型化关节设计。
**必用物料及数量:**MA730 x 3
**自备物料:**MCU、PCB、分立电子元器件若干、锂电池
项目名称:基于MP2797DFP-0001的12节电池关系系统
物料型号:MP2797DFP-0001
数量:5
创意名称:机器人/自制飞机航电用不间断备用应急电源系统(UPS模块)
一、项目简介
面向机器人控制系统及自制飞机航电系统的高可靠性供电需求,设计一款基于MPS芯片的不间断备用应急电源模块(UPS)。系统实现主电
源与备用电池电源的无缝自动切换,确保在主电源故障时对外持续不间断供电,同时具备主/备电源电路的电压、电流实时监测功能。
对外提供两路独立输出:
- 第1路:12V / 8A(驱动机器人舵机/航电主系统等大功率负载)
- 第2路:12V / 3A(供航电辅助设备、通信模块、传感器等)
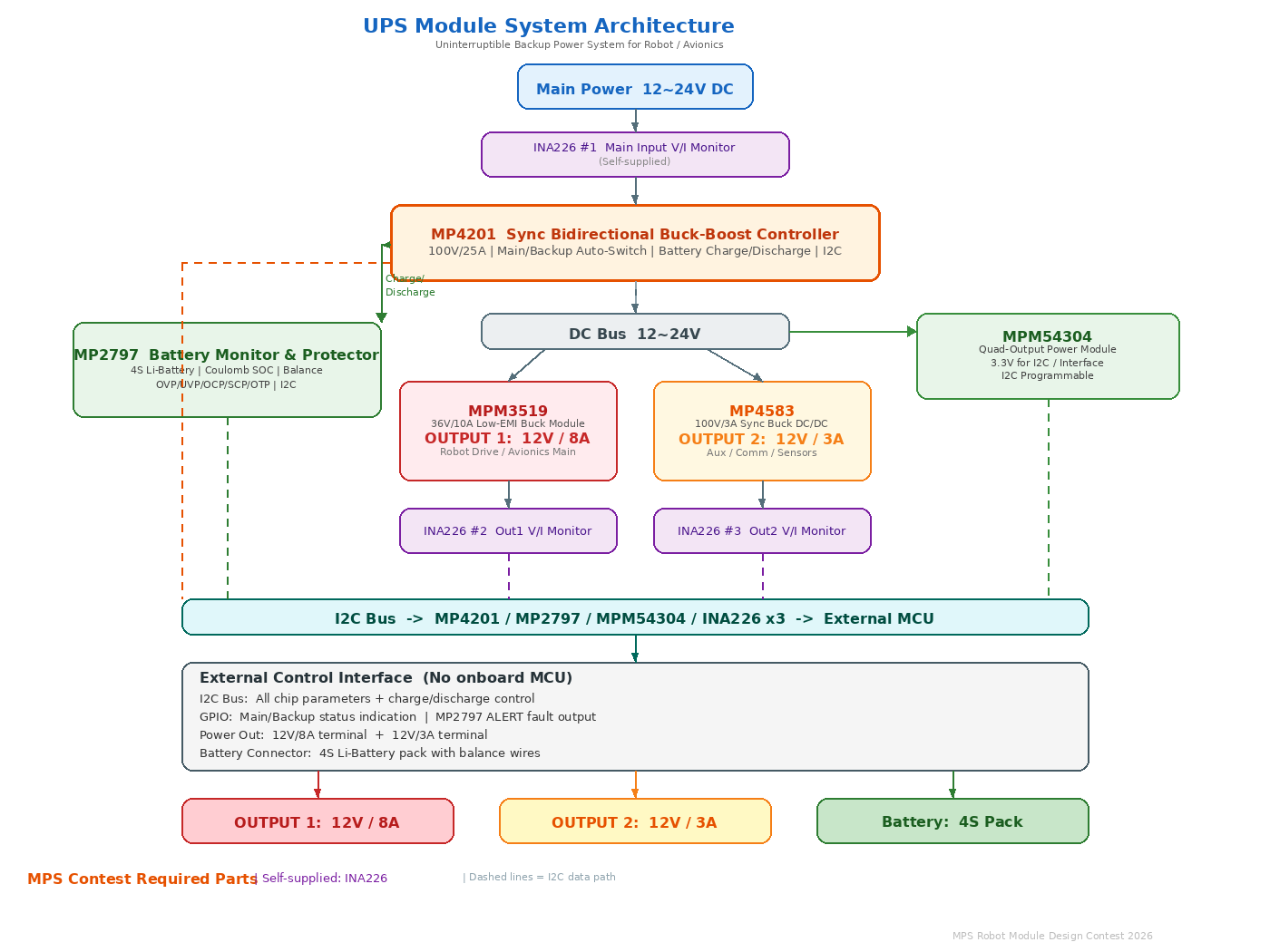
本模块为纯电源管理板,板载不含MCU,对外提供I2C及GPIO控制接口,由用户外接MCU进行监控管理。可广泛应用于机器人驱动应急
供电、自制飞机航电备用电源、移动机器人平台等场景。
二、系统设计方案
2.1 系统架构
2.2 各模块功能说明
① 主/备电源智能切换与充放电管理 —— MP4201
采用 MP4201(100V、25A同步双向升降压控制器,带I2C接口)作为核心电源路径管理芯片:
- 主电源正常时:主电源直接向负载供电,同时通过MP4201为备用电池组充电;
- 主电源故障时:MP4201自动将备用电池能量升降压至母线电压,无缝切换,负载端无感知;
- 通过I2C接口,外接MCU可实时读取输入/输出电压、电流等关键参数。
② 备用电池监控与保护 —— MP2797
采用 MP2797(7~16节高精度电池监控器和保护器,带库仑计数)管理4S锂电池组:
- 实时监测每节电芯电压、总电压、充放电电流、温度;
- 内置库仑计实现精准SOC估算;
- 集成过压、欠压、过流、短路、过温全硬件保护及被动均衡;
- 通过I2C上报电池组完整状态数据。
③ 第1路输出:12V/8A —— MPM3519
采用 MPM3519(36V、10A同步降压电源模块):
- 从直流母线降压输出稳定12V/8A;
- 内置电感,集成度高,低EMI设计,适合航电等电磁敏感场景;
- 为机器人舵机驱动或航电主系统等大功率负载供电。
④ 第2路输出:12V/3A —— MP4583
采用 MP4583(100V、3A、8μA IQ同步降压DC/DC变换器):
- 从直流母线降压输出稳定12V/3A;
- 100V宽压输入,超低静态电流,效率高;
- 为航电辅助设备、通信模块、传感器供电板等中等功率负载供电。
⑤ 电压电流实时监测 —— INA226(个人自备)
在主电源输入端和两路负载输出端各部署 INA226 高精度双向电流/功率监测芯片(个人自备物料):
- 16位ADC,电压电流同步采集,精度高;
- I2C接口,与板载其他芯片共享总线,外接MCU统一读取;
- 3路INA226分别监测:主电源输入电压电流、12V/8A输出电压电流、12V/3A输出电压电流。
⑥ 板载辅助供电 —— MPM54304
采用 MPM54304(四路输出电源模块,带I2C和MTP)为板载芯片及对外接口供电:
- 提供3.3V(I2C上拉/接口电平)、其余通道预留备用;
- I2C可编程输出电压,灵活适配。
三、对外控制接口定义
本模块板载不含MCU,对外提供以下接口供用户外接主控:
| 接口 |
类型 |
说明 |
| I2C总线 |
4pin排针(SDA/SCL/VCC/GND) |
统一访问MP4201、MP2797、MPM54304、INA226×3,读取全部电压/电流/SOC参数并控制充 |
| 放电策略 |
|
|
| 主/备状态指示 |
2pin排针 |
GPIO电平信号,指示当前供电来源 |
| 故障告警 |
1pin排针 |
MP2797 ALERT输出,电池异常时拉低,接MCU中断 |
| 电源输出 |
大电流端子×2组 |
第1路12V/8A、第2路12V/3A |
| 主电源输入 |
大电流端子 |
12~24V DC输入 |
| 电池组接口 |
排线座 |
连接外部4S锂电池组(含均衡线) |
四、应用场景
| 场景 |
说明 |
| 机器人控制系统 |
主电源异常时UPS保障关节驱动不失步、控制器不掉电,避免机器人失控 |
| 自制飞机航电系统 |
飞控、GPS、数传、舵机等关键航电设备的备用电源,主电池故障时自动切换,保障安全返航 |
| 移动机器人平台 |
为ROS小车、巡检机器人等提供不间断供电保障 |
五、所选物料型号及数量
大赛必用物料(由MPS邮寄):
| 物料型号 |
用途 |
数量 |
| MP4201 |
同步双向升降压控制器,主/备电源切换与电池充放电 |
5 |
| MP2797 |
电池监控保护器,备用电池组BMS |
5 |
| MPM3519 |
36V/10A降压电源模块,12V/8A输出 |
5 |
| MP4583 |
100V/3A降压DC/DC,12V/3A输出 |
5 |
| MPM54304 |
四路输出电源模块,板载辅助供电 |
5 |
(每种多申请1~2颗作为焊接调试备用)
个人自备物料:
| 物料型号 |
用途 |
数量 |
| INA226 |
高精度电压电流监测(主路+两路输出) |
5 |
| 电感、电容、连接器等 |
外围无源器件 |
若干 |
六、项目时间计划
| 阶段 |
时间 |
内容 |
| 第1~2周(5.1—5.16) |
方案与PCB设计 |
完成原理图、Layout,MPSmart仿真验证,提交PCB打样 |
| 第3周(5.17—5.25) |
物料到位与焊接 |
收到MPS物料及PCB,采购自备物料,完成焊接 |
| 第4~6周(5.26—6.15) |
分模块调试 |
逐模块上电调试:电源切换→电池保护→12V/8A输出→12V/3A输出→INA226采集→辅助供电 |
| 第7~8周(6.16—7.6) |
系统联调 |
全系统联调,主/备切换验证,双路输出负载测试,I2C接口协议调试 |
| 第9~10周(7.7—7.20) |
测试优化 |
极端工况测试(满载切换、低电量切换、短路保护),热设计优化 |
| 第11周(7.21—7.31) |
文档与提交 |
整理设计文档,拍摄演示视频,提交作品帖 |
七、项目亮点
- 真正不间断供电:基于MP4201双向升降压拓扑,主/备电源无缝切换,切换时间极短,负载端无感知
- 全链路参数监测:INA226×3实现主电源及两路输出的电压电流高精度数字化监测,MP2797提供电池组完整状态,所有数据通过I2C统一
读取
- 纯电源模块设计:板载不含MCU,通过I2C总线对外提供完整控制接口,即插即用,适配任意主控平台
- 低EMI设计:MPM3519低EMI同步降压模块,适合航电等电磁敏感环境
- 全MPS芯片方案:核心电源通路全部采用MPS大赛必用物料,设计工具链完整(MPSmart仿真、DC/DC设计工具、电感选型工具均可用)
MPS 机器人模块设计大赛进行中|创意评选阶段
MPS 机器人模块设计大赛当前进入创意评选阶段(2026年5月1日–5月13日)。
还没报名?现在提交创意依然有效!
已报名但资料不全?抓紧补全跟帖创意和物料申请表,锁定参赛资格~
创意提交 & 补全资料截止:2026年5月12日
大赛详情:MPS 机器人模块设计大赛
使用 MPS 的 MA600A 磁性角度传感器来制作摇杆控制器
目前很多人形机器人还是用航模遥控器进行控制,传统的电位器摇杆存在机械磨损和寿命问题,而 MA600A 凭借其高精度、高分辨率和非接触式的特点,能够完美解决这些痛点。
以下是基于 MA600A 制作无电位器控制摇杆的具体设计方案:
核心设计思路
摇杆需要检测 X 轴和 Y 轴两个方向的偏转。因此,你需要使用 2颗 MA600A 传感器 和 2颗微型磁铁。
基本原理:将磁铁固定在摇杆的转轴上,MA600A 传感器固定在 PCB 上正对磁铁的位置。当摇杆偏转时,磁铁随之转动,MA600A 检测磁场角度的变化并转化为数字信号,从而得出摇杆的偏转角度。
安装方式:推荐使用 离轴(Off-axis)安装。因为摇杆的转轴中心通常被机械结构占用,离轴安装可以将传感器布置在转轴侧面的任意位置,非常适合摇杆的紧凑结构。
硬件物料与结构设计
核心传感器:MA600A × 2。它采用 QFN-16 封装,直径仅 3mm,体积极小,可以轻松嵌入摇杆底座。
磁铁选型:建议选用 径向充磁的圆形或圆环磁铁。磁铁安装在摇杆转轴底部或侧面,需确保磁铁旋转时与 PCB 上的传感器保持平行。
主控 MCU:主控使用树莓派 PICO,不仅成本低廉、性能强大,而且对 MicroPython 和 C/C++ 都有极好的支持。用于读取 MA600A 的角度数据并转换为游戏手柄/控制器的标准信号(如 USB HID 或 蓝牙信号)。
机械结构:
设计一个万向节结构,将摇杆的 X 轴和 Y 轴物理分离。
X 轴和 Y 轴的转动轴上分别固定一颗磁铁。
在两颗磁铁的正下方(或侧面)的 PCB 上,分别焊接一颗 MA600A。
硬件电路连接
MA600A 支持 3.3V 供电,且通信接口丰富。为了获取高精度的绝对角度,推荐使用 SPI 接口。两颗 MA600A 可以通过 SPI 总线并联与 MCU 通信。
方案优势
超长寿命:完全无接触测量,消除了传统电位器的碳膜磨损问题。
极高精度:MA600A 具有高达 12 位至 15 位的无噪声分辨率,能捕捉到手指极其微小的推动动作。
抗干扰与稳定性:采用 TMR(隧道磁阻)技术,相比传统霍尔传感器,具有更好的温度稳定性和更低的噪声。
weics
57
【2026 机器人模块大赛】创意名称:高端微型推杆和轻型力控夹爪
应用场景:我公司自研复合机器人和各种末端工具,包括夹爪和微型推杆,主要用于工业制造、医疗、检测实验室场景。机械臂末端夹爪需要轻量化、力控化;微型推杆希望寿命更长,反馈更全面。希望对标现有产品自研更有竞争力的轻型力控夹爪和微型推杆。
必备物料:MPQ6547A驱动,MA600A磁编,MP4583、MPM3519、MPM3826C DCDC ,MMP1RH驱动模组,MMS1RH电机成品模组
方案简介
如下三个方案均会考虑
(1) MMS1RH系列产品,一体化电机驱动模组,集成空心杯电机+驱动器+磁编码器+减速机。EasyFOC库可通过 SPI 接口读取电机的角度、电流、电压反馈,并根据客户给定的控制模式计算对应指令,发送至 MMS1RH 以实现位置或速度闭环控制;其中,对实时性要求较高的 FOC 电流环部分,直接在 MMS1RH内部完成。
(2) 电机驱动板MMP1RH,该器件具备 FOC 控制功能,集成了角度传感器,拥有超小尺寸(直径 9mm、厚度 6.5mm),输入电压范围为 5V-18V,最大2A相电流,支持最大转速 60000rpm,配备 RS485 接口,具备UVLO/OCP保护功能,可编程开关频率高达80kHz,角度传感器分辨率为14bits,电流采样ADC分辨率为 10bits。
(3) 上面不满足时,自研驱动板,采用STM32G474 MCU+MPQ6547A+MA600A,用于微型推杆和夹爪,我们有FOC电机驱动板开发经验。
申请物料:
MPQ6547A-10pcs
MA600A–10pcs
MP4583–10pcs
PM3519–10pcs
MPM3826C–10pcs
MMP1RH–4pcs
MMS1RH–2pcs
创意名称
机器人管家
项目简介
面向家用机器人物联网应用场景,设计一款可以控制的远程监控家庭管理系统。
控制核心以STM32MCU为核心,以 MPS 电源、驱动、传感芯片为作为电机驱动板,构建完整的无刷电机伺服控制单元,实现位置闭环与可靠驱动保护,可直接应用于云台等关节机构,辅以摄像头和话筒等电气件,实现机器人管家功能。
系统方案
-
动力源泉
18650电池7.5V作为动力源泉,采用 MPC电源芯片转为为5V,3.3V电平,为后级驱动电路与主控系统提供稳定低压供电,满足机器人移动平台与模块化供电需求。
-
驱动单元
以 MP6540H 三相集成驱动芯片为核心,内置功率桥与电流采样电路,为实现电机平稳运行与精准力矩输出。
-
传感与闭环控制
使用 MA600A 磁角度传感器实时采集电机转子角度,实现位置反馈,提升低速运行平稳性。
-
其他功能
实现摄像和话筒功能。同时通过有线、无线网络模块实现外部通信。
【入围名单公布】MPS 机器人模块设计大赛
MPS 机器人模块设计大赛入围名单新鲜出炉啦!
感谢每一位小伙伴的热情参与和大力支持~
一、物料邮寄信息确认
我们会通过邮件联系所有入围小伙伴,统一核实物料邮寄信息哦!
邮寄信息确认时间:2026年5月13日-5月14日
入围的小伙伴记得及时查收邮件,认真填写物料信息表,千万别填错耽误邮寄哦~
二、物料邮寄
物料邮寄时间:2026年5月15日—5月22日
我们将按照大家提交的信息表统一安排邮寄物料,记得多多留意包裹物流,静待大赛物料到家。
三、入围名单
大赛报名阶段,大家的参赛热情直接拉满,入围名额惊喜加码!由原定15名扩增至23名,下面是此次大赛的入围名单,所有入围作品创意排名不分先后。恭喜成功入围的小伙伴,期待大家接下来的精彩作品!
| MPS论坛用户名 |
入围创意名称 |
| Manda_Huang |
低功耗自适应智能外骨骼柔性关节 |
| honestqiao |
基于MPQ6547A与MA900的桌面级六轴机械臂关节运动控制模块 |
| 707565139 |
机器人双电池热插拔控制演示板 |
| mengde0532 |
机器人/自制飞机航电用不间断备用应急电源系统(UPS模块) |
| 13705694697 |
面向智能配送与分拣机械臂的关节智能驱动与感知一体化模块 |
| 123587469 |
力反馈旋钮的实现 |
| xuxiaojie72 |
基于MA600A传感器制作一个无电位器摇杆控制器 |
| 83321549 |
面向高阶机器人的“驱控-电源-监测”一体化智能微型关节模组 |
| zealerlu |
微型高精度机器人单关节闭环驱动模块 |
| 474569714 |
智能家庭陪伴与辅助机器人 |
| Goldblock |
基于MCS1805的高精度隔离式双向电流监测仪(支持USB上位机分析) |
| XXYY |
机器人关节高精度闭环驱动模块 |
| 428428 |
机器人手部闭环电机夹爪 |
| asd563246723 |
手办总线舵机 |
| weics |
高端微型推杆和轻型力控夹爪 |
| superstar_gu |
机器人管家 |
| zhjlmt |
Dual-channel Type-C 机器人供电系统 |
| sdcwhy |
基于MPS的智能家居六能交互机器人 |
| yaof |
自动循迹移动机器人平台 |
| guojian_beyond |
工业机器人控制器及控制系统设计 |
| ljf1307 |
基于MPS芯片的高集成度的驱控一体关节模组 |
| 985446613 |
高精度关节编码器模组 |
| 3231504084 |
移动机器人高精度电池管理系统 |
四、作品提交注意事项:>> 点击查看
五、大赛日程更新
MPS机器人模块设计大赛火热进行过程中,创意作品持续更新,欢迎小伙伴们就创意和作品实时分享精彩观点,对每一份设计畅所欲言,分享看法、交流思路、提出建议。回帖畅聊还赢【防潮垫、电力监测仪、多功能钳、京东卡】等好礼。
参与方式: 点击下方“ 我要回帖 ”按钮,进入>>MPS技术论坛–市场应用解决方案–机器人板块,在>>【大赛入围帖】或主题中带有“【2026机器人模块大赛】”的帖子下回帖即可。活动结束后,我们将评选出30位优秀回帖的小伙伴送出好礼。
回帖时间:2026年5月18日—8月31日