创意名称:面向智能配送与分拣机械臂的关节智能驱动与感知一体化模块
应用场景:针对工厂中多类零件识别、抓取、搬运和精准码放需求,模块为机械臂关节提供稳定驱动、位置闭环、负载感知与异常保护能力,支撑机器人完成零件分类、收纳与回收全流程任务。
必备物料:MP4583;MA600A;MP2797。
方案简介
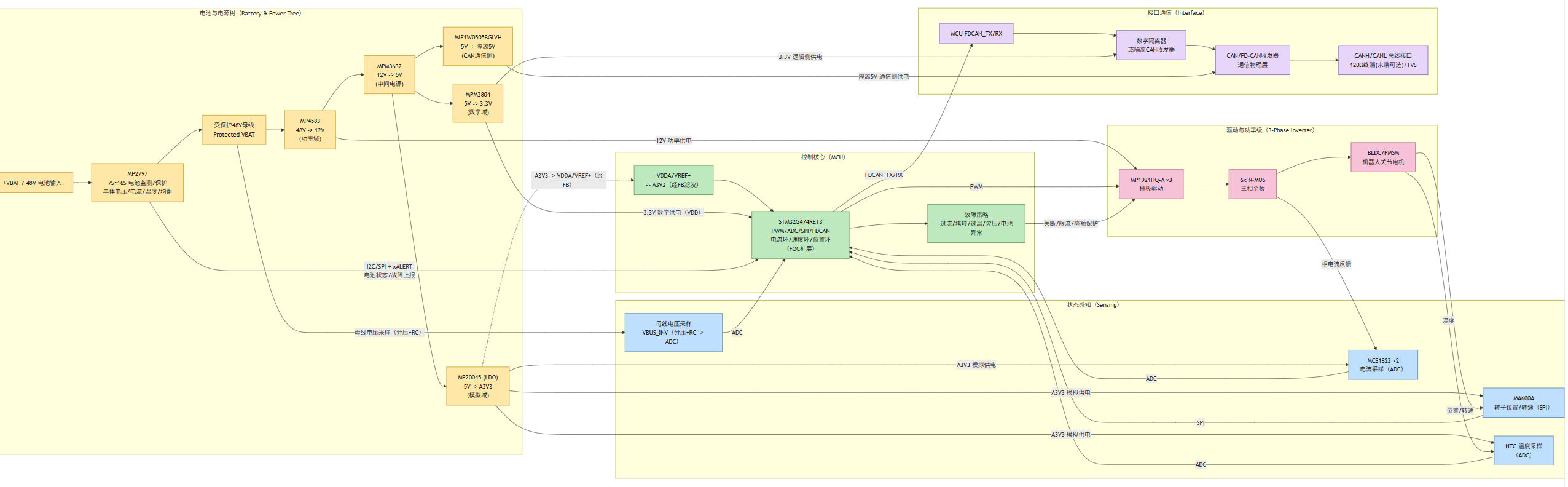
智能配送与分拣任务要求机器人完成工件识别后的抓取、搬运、定位和精准码放。机械臂关节作为执行链路的核心,其低速稳定性、位置精度、负载感知能力和通信可靠性,直接影响工件是否能稳定夹取、准确投放以及避免掉落和碰撞。本方案设计一款面向机械臂关节的智能驱动与感知一体化模块,集成三相电机驱动、电流检测、磁编码位置反馈、温度监测、母线电压采样和CAN/FD-CAN通信接口。模块采用基于磁编码器反馈的有感驱动结构,可支持电流环、速度环、位置环及FOC控制扩展,适用于机械臂在分拣任务中的低速定位、柔性抓取和重复码放动作。模块还通过电流、位置、温度、母线电压等多源状态感知,对堵转、过载、过温、欠压等异常状态进行基础识别与保护,并通过CAN/FD-CAN与机器人主控进行状态上报、参数配置和运动指令交互,形成适合分布式机械臂关节控制的执行节点。由于机械臂关节模块采用48V电池供电,系统前端引入电池监测与保护能力,对电池单体电压、整包电压、充放电电流及电池温度进行监测,为后级驱动与控制电路提供受保护的VBAT母线,提升电池供电场景下的安全性和可靠性。
功能设计
电池监测与保护:
MP2797 用于48V电池包前端监测与保护,为系统提供电池状态评估、故障上报和供电安全保护。
电源管理:
MP4583 用作前级降压,将48V输入转换为12V,为三相驱动与功率级提供供电基础。
MPM3632 将12V进一步降压至5V,作为系统中间电源。
MPM3804 将5V转换为3.3V,为MCU和数字控制电路供电。
MP20045 由5V生成低噪声A3V3模拟电源,供电流检测、位置检测以及MCU模拟电源端使用,降低开关纹波对ADC采样精度的影响。
MIE1W0505BGLVH 将主5V转换为隔离5V,用于CAN通信隔离侧供电,降低电机驱动噪声和地电位差对通信链路的影响。
运动驱动:
MP1921HQ-A 高低侧栅极驱动器配合6个N沟道MOSFET构建三相全桥逆变器,实现BLDC/PMSM关节电机驱动。MCU输出PWM信号控制三相桥臂,为换相、调速、电流环控制和FOC扩展提供硬件基础。
电流检测:
MCS1823GQTE-320BRN 用于电机电流实时采样,支持双向电流检测,带宽可达120kHz,并集成过流检测(/OCD)功能。电流信息既可用于闭环控制,也可辅助判断抓取负载变化、堵转、碰撞和过载状态。
位置反馈:
MA600A 磁编码器用于采集电机转子位置与转速,支持SPI/SSI以及ABZ、UVW、PWM等输出方式。其位置反馈能力适合机械臂关节的低速稳定控制、重复定位和精准码放任务。
控制与通信:
主控采用STM32G474RET3,负责PWM输出、ADC采样、SPI位置读取、故障处理和CAN/FD-CAN通信。通信链路用于接收机器人主控的运动指令,并上传关节位置、电流、温度、母线电压和故障状态。
技术亮点
1.面向智能分拣任务的关节执行模块:模块直接服务于工件抓取、搬运和码放动作,重点提升机械臂低速稳定性、重复定位精度和动作可靠性。
2.驱动与感知一体化设计:将三相驱动、电流检测、位置反馈、温度监测和母线电压采样集成到同一关节模块中,使关节从单纯执行器升级为可感知、可诊断的智能节点。
3.多源状态融合保护:通过电流、位置、温度和母线电压信息,可识别堵转、过载、过温、欠压等异常情况,降低分拣过程中工件掉落、误放和碰撞风险。
4.紧凑型模块化架构:采用小封装电源、驱动和传感器器件,便于集成进自研一体化关节模组,也方便后续扩展到桌面机械臂、轮式机器人机械臂或末端执行机构。
系统框图
物料数量
申请物料:
MP2797 x2
MP4583 ×2
MA600A ×2
自备物料:
MPM3632 ×1
MPM3804 ×1
MP20045 ×1
MIE1W0505BGLVH ×1
MP1921HQ-A ×3
MCS1823GQTE-320BRN ×2
N沟道MOSFET ×6
STM32G474RET3 ×1
CAN/FD-CAN收发器 ×1
数字隔离器或隔离CAN收发器 ×1
电压分压电阻及外围阻容器件 ×若干