各位朋友大家好,在我们日常的电路控制中,电机应该是接触最多的,同样电机的分类也是五花八门,例如舵机,无刷电机,有刷电机,步进电机,伺服电机等等。本期要分享的是其中的一种,无刷电机的控制电路。
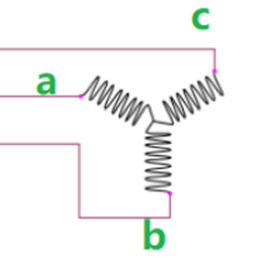
在分享无刷电机控制电路之前,先向不熟悉的朋友介绍一下无刷电机内部的简化图,无刷电机内部可以简化为:
各位朋友大家好,在我们日常的电路控制中,电机应该是接触最多的,同样电机的分类也是五花八门,例如舵机,无刷电机,有刷电机,步进电机,伺服电机等等。本期要分享的是其中的一种,无刷电机的控制电路。
在分享无刷电机控制电路之前,先向不熟悉的朋友介绍一下无刷电机内部的简化图,无刷电机内部可以简化为:
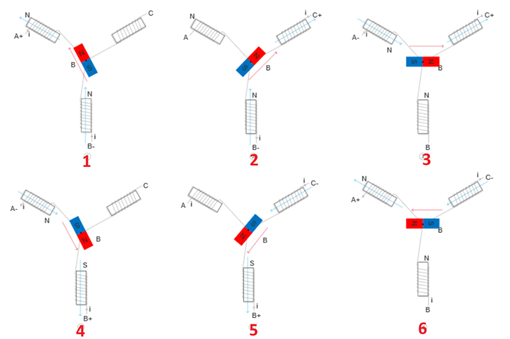
最常见的控制方式就是六步换相法,只需要控制线圈电流按照如下顺序导通就可以让无刷电机转动:
A接入电源+,B接入电源-,C悬空,转子会旋转至图①位置;
在①基础上,C接入+,B接入-,A悬空,转子将从①位置旋转至图②位置;
在②基础上,C接入+,A接入-,B悬空,转至将从②位置旋转至图③位置;
在③基础上,B接入+,A接入-,C悬空,转子将从③位置旋转至图④位置;
在④基础上,B接入+,C接入-,A悬空,转子将从④位置旋转至图⑤位置;
在⑤基础上,A接入+,C接入-,B悬空,转子将从⑤位置旋转至图⑥位置。
顺时针旋转:
(A+,B−,C×)→(A×,B−,C+)→(A−,B×,C+)→(A−,B+,C×)→(A×,B+,C−)→(A+,B×,C−)(A+,B−,C×)→(A×,B−,C+)→(A−,B×,C+)→(A−,B+,C×)→(A×,B+,C−)→(A+,B×,C−)
其中,+代表接通电源+极;− 代表接通电源-极;×代表悬空.
逆时针旋转:
(A+,B−,C×)←(A×,B−,C+)←(A−,B×,C+)←(A−,B+,C×)←(A×,B+,C−)←(A+,B×,C−)(A+,B−,C×)←(A×,B−,C+)←(A−,B×,C+)←(A−,B+,C×)←(A×,B+,C−)←(A+,B×,C−)
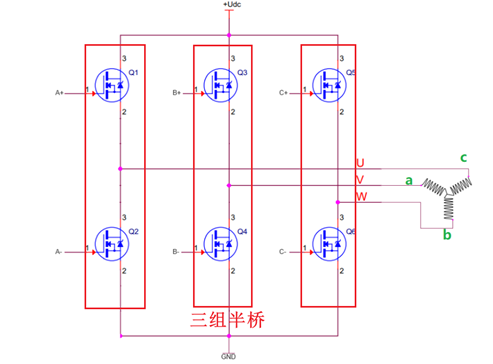
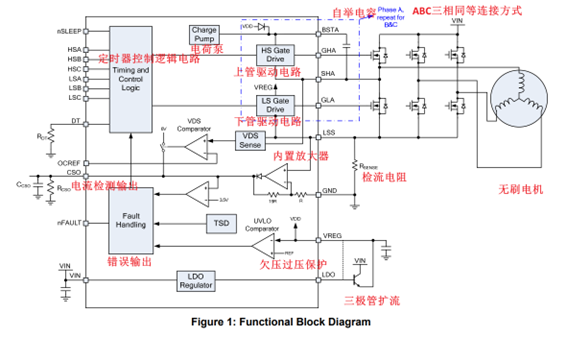
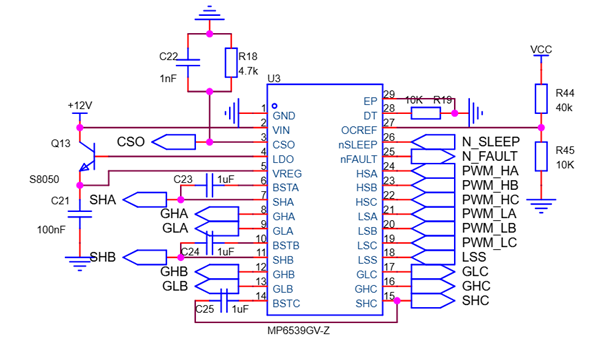
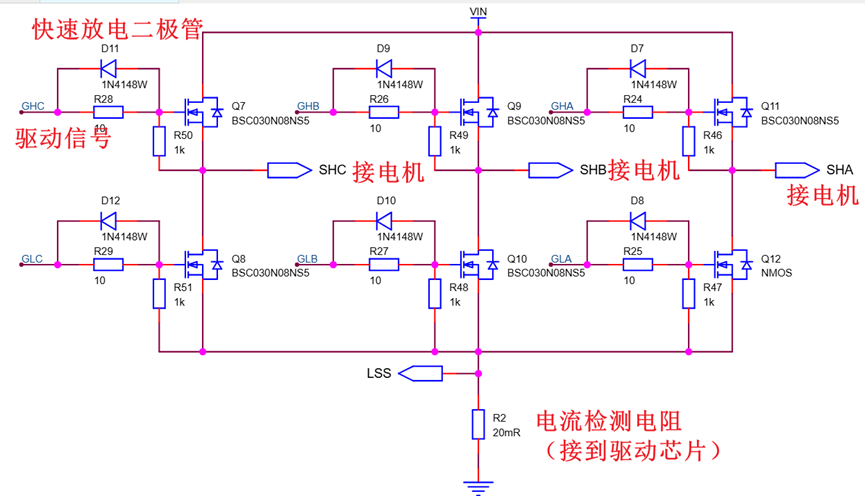
那么知道这个电路的工作原理后,我们就可以找对应的芯片进行设计了。那么本次是找了MPS的MP6539作为驱动芯片,芯片的内部逻辑框图如下所示,这个芯片内部集成了逻辑驱动,只需要连接到外部的MOSFET组成的半桥,然后驱动无刷电机即可: