【2026 机器人模块大赛】+基于MPS的智能家居六能交互机器人+PCB设计1
一、查手册确定模块PCB关键信息及布局
首先我选择最普通的4层板,毕竟是新手,别浪费资源。本来设计一个和8404云台电机直径35mm一样大的圆形PCB,但是我选的元件布置完后怎样也布置不下,只能放大一些,把PCB尺寸改到了直径50mm。

(一)各模块布置
因为PCB有3个固定孔,所以我把主要元件分配在3个区域内,电源和驱动模块以及体积较大的电容、TVS管等放顶层,磁编码和电流反馈模块放在底层。
1、MPM3519电源模块
电源引脚本来想用30A的插接端子,发现太大,最后选择了通过2.54mm的插针引脚引了出来,还增加了输入和输出TVS保护,同步频率设定引脚我增加了一个跳线来切换,默认固定频率,其他有用引脚也引出至端子。
重点提的是,这个模块引脚全部在里面,对于我这新手肯定不是很友好,所以把引脚焊盘拉长漏了出来,在此感谢坛友们的建议!
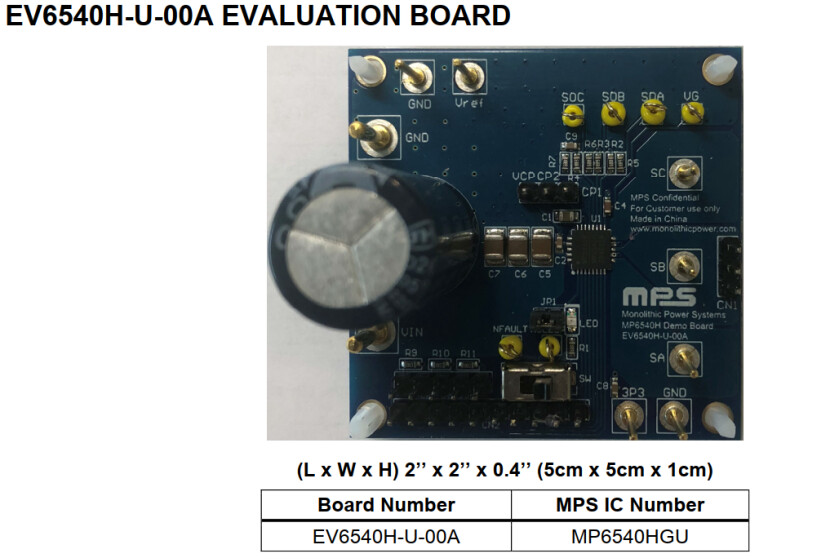
2、MP6540H驱动模块
可以参考MPS官方的板子做设计:
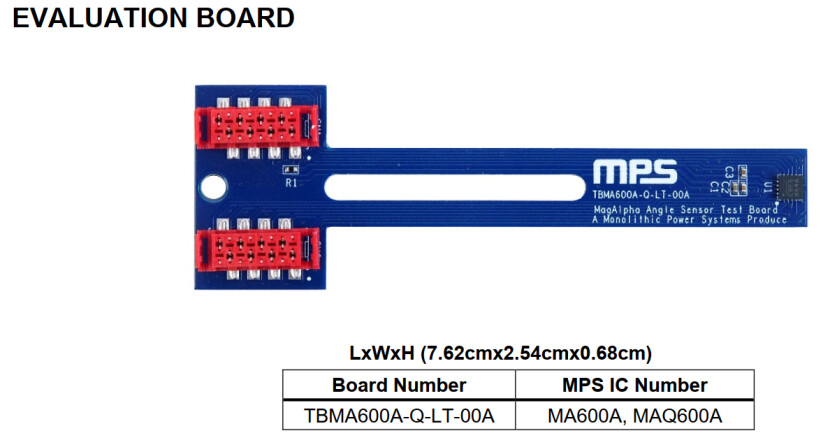
3、MA600A 磁编码位置反馈模块
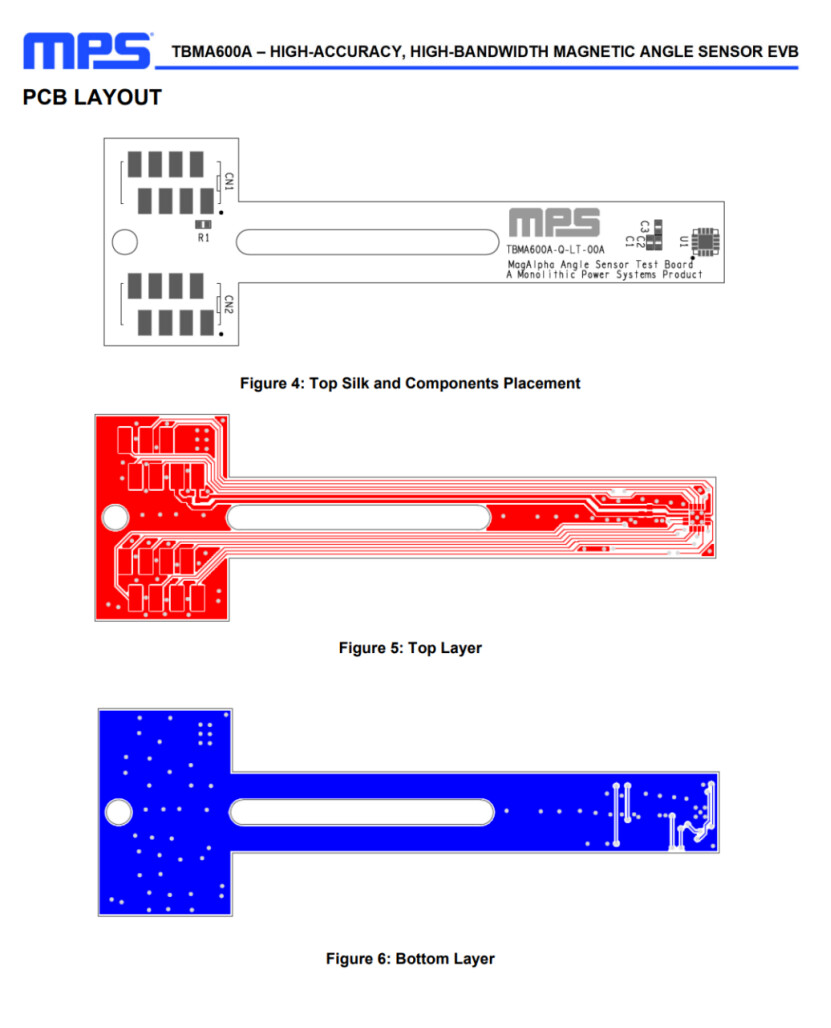
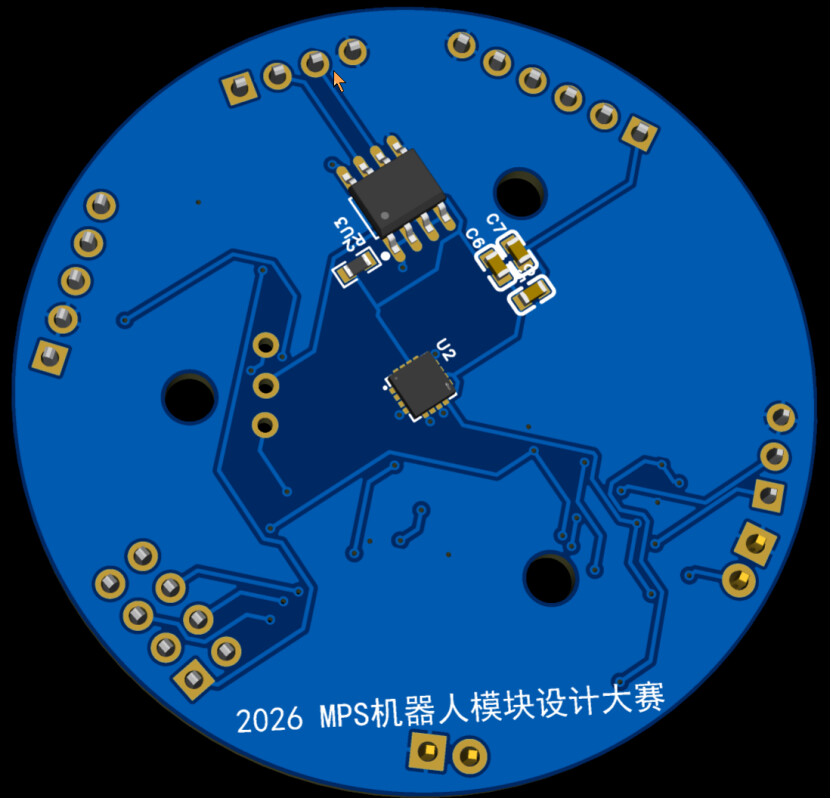
我选择把MA600A模块布置在底层,正中心位置,把SPI信号引致端子,可以参考MPS官方的板子。
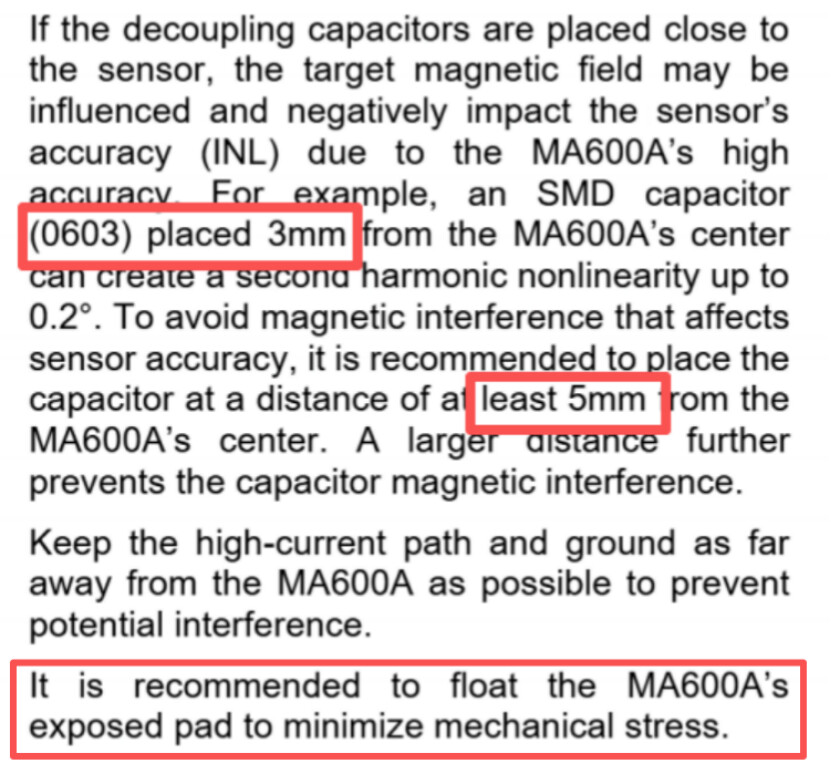
如下面的手册说明,值得注意的两点:
1、电容距离MA600A磁场中心5mm以上,否则会影响稳定性!
2、MA600A下方裸盘要悬空,减少应力,不过可以参考TBMA600A-Q-LT-00A板子
4、MCS1805电流反馈模块
没啥好位置,我选择放在底层,可以节省空间,顺便把电流采集引脚引出至端子
(二)整体布局
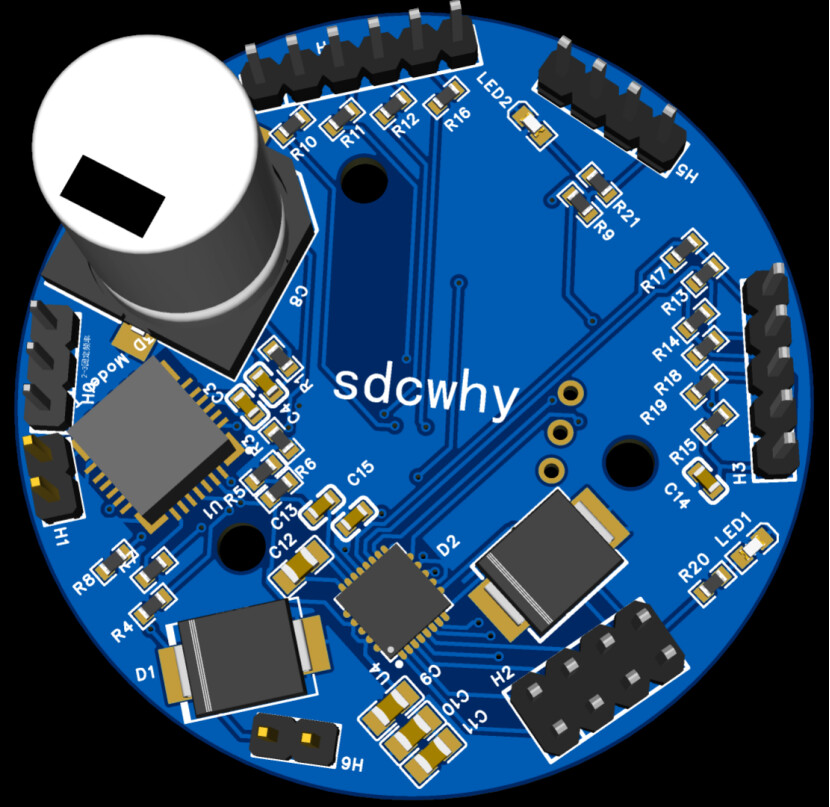
最终的3D图如下:
二、遇到的问题及总结
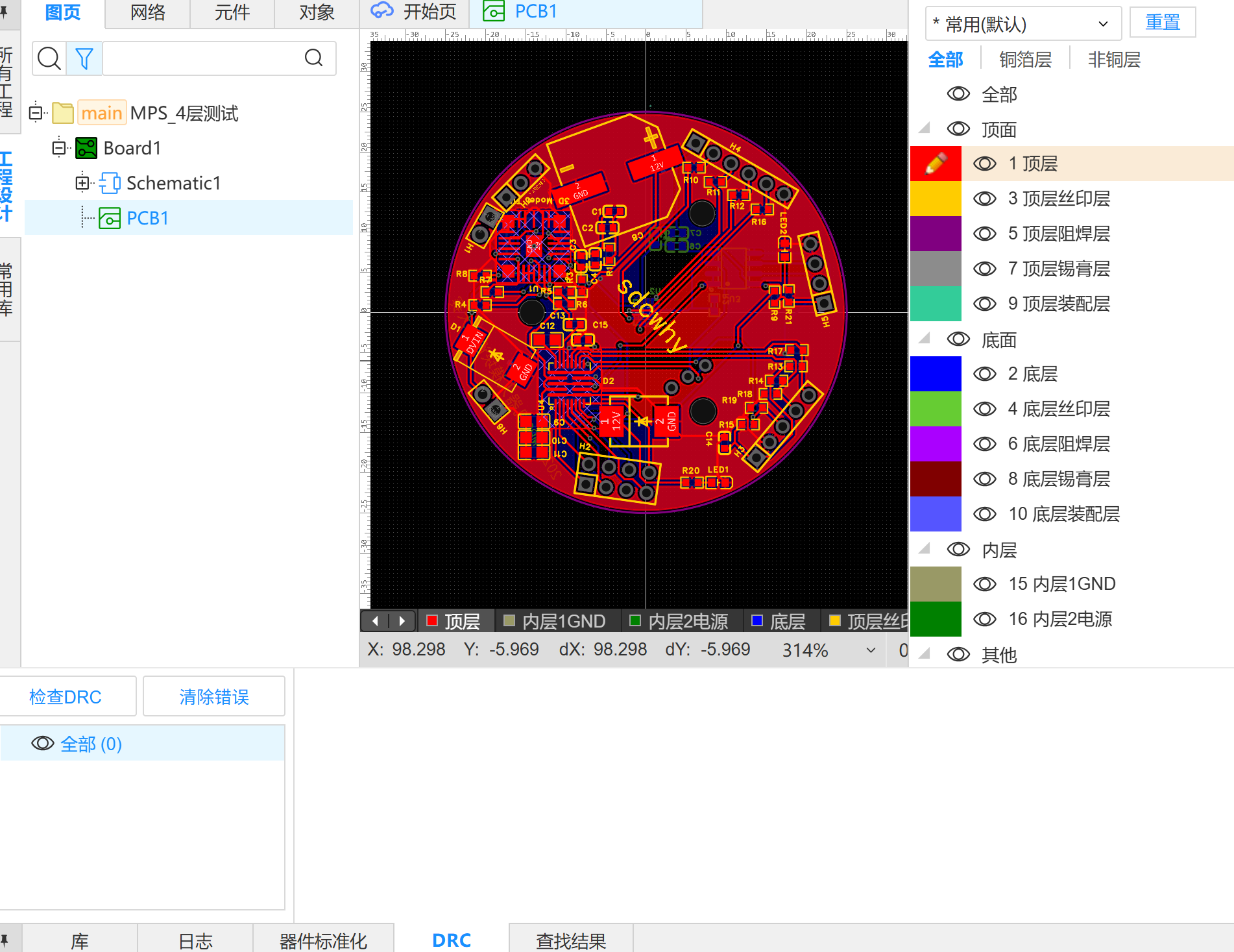
经过几天的折腾,也查了不少资料,咨询了一些坛友,边学边改,终于完成了上面的PCB设计,过程中遇到了一些问题,比如布线布好后,再次打开EDA软件,部分连线会丢失,经过坛友和EDA平台服务人员的测试帮助下,最终解决了问题,原因是浏览器问题,我用的EDGA和谷歌浏览器,都不行,后来用软件打不开,平台技术人员告诉用最新版软件,问题解决。
(一)遇到的问题
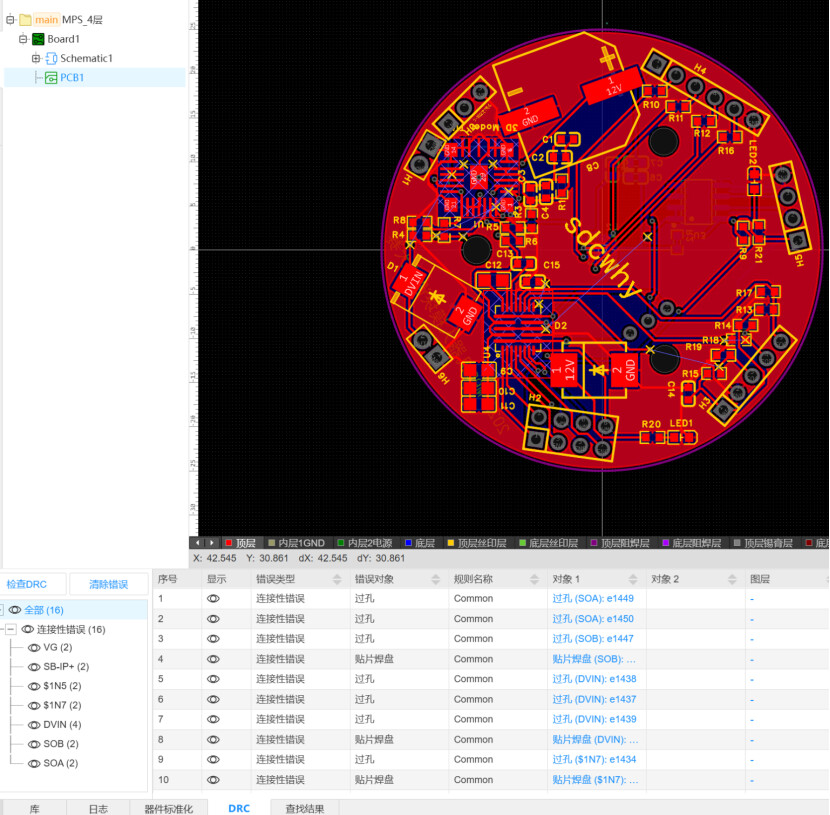
问题:1:我一直使用在线版的EDA工具,我的PCB布完线,检查DRC正常,也都保存了,都已经下单了,然后再打开项目发现PCB好多错误,相当于最终版项目文件没有正常保存!,试了好几次都不行,换电脑测试还是不行,浏览器我有谷歌和edge,其中设计过程中谷歌各种莫名奇妙的无响应。
解决办法:使用单机版EDA最新版,再重新布线保存后,重新打开项目没事了,不过第一次打板的最终版没有了。
问题2:使用单机版EDA软件打开项目提示“无法访问CacheStorage,不能正常运行编辑器”请使用最新谷歌或火狐浏览器
解决方法:我使用的单机版EDA软件,不知道为啥提示这个浏览器相关内容,难道系统缓存是存储一个位置?官方让更新单机版EDA软件到最新版本3.2.135。
问题3:更新软件问题,我单机版EDA软件是昨天打开时提示更新的,然后版本竟然显示3.2.121,官方技术说最新版本是3.2.135,我检查更新已经是最新版本了。

解决办法:官方技术让我到官网下载最新版软件,然后重新安装。
问题4:安装完成后还提示3.2.121,官方技术支持回复可能旧版本没删除干净。
解决办法:再安装一次新版本后正常,再次打开单机版软件,版本号变过来了,而且单机版软件保存的项目没有再次出现连线丢失问题。
(二)设计缺陷
因为我是第一次打板,也不懂,检查DRC正常了就提交打板了,并且已经付款。因为再次打开工程发现没有保存最终打板的PCB,这次折腾了半天,怕是不是自己设计的PCB根本用不了,导致重新打开项目丢失连线的,结果歪打正着,知道了还有PCB DFM检查这个东西,检查完发现确实有很多问题,其中丝印问题152项、阻焊层分析17项、阻焊线路等间距31项,过孔间距1项,早知道有这功能就可以提前自己修改了!
1、丝印问题,确实有个别挨着焊盘了
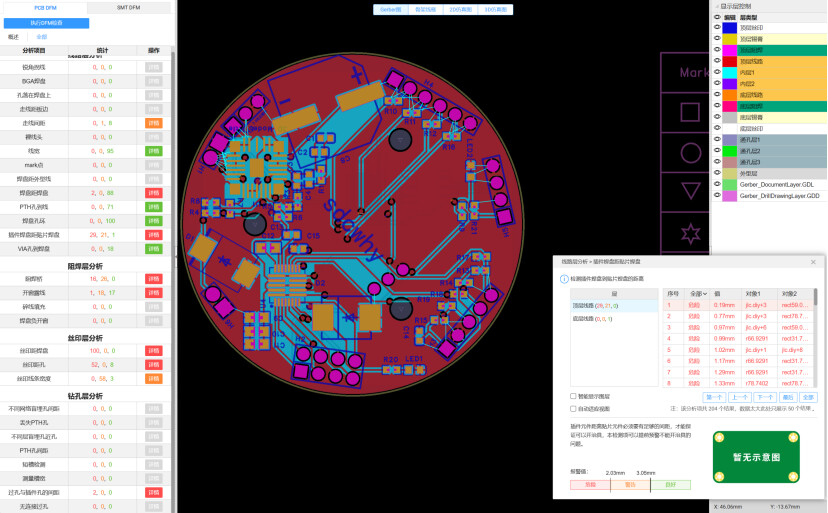
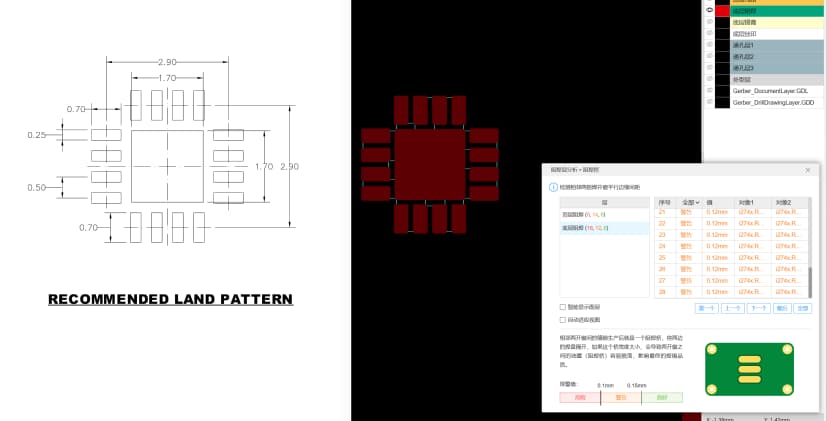
2、间距问题,其中我看最危险的是MA600A封装,不过我没改过,这是EDA官方提供的封装
3、其他问题影响都不大,下次设计注意就好了!
(三)总结
本来想把主控设计在PCB上面,后来想了想,主控都是各种高速信号,涉及干扰、等差、EMC问题等知识面太广了,自己又是小白,还是先从简单的开始吧,省着打板出来各种问题,打消自己的积极性。
由于是第一次设计PCB并打板,所以不知道是否存在问题,还请大佬进行指点迷津,先谢谢了!
三、下一步计划
等PCB到货后,焊机元器件、测试打的PCB功能是否正常,加热台也买了(在路上),我可是入坑加下血本了~