【2026 机器人模块大赛】支持EtherCAT/Modbus TCP与PD快充的麦克纳姆轮全向底盘+开箱+芯片介绍
电池与快充接口:
- MP5038(USB PD源控制器) & MP4501(Type-C端口保护器):构建机器人的Type-C快充接口。MP5038负责与充电器进行PD协议握手,申请高压大电流(如20V/5A);MP4501提供OVP和ESD保护,防止热插拔时的浪涌损坏电路。
- MPM54304(四路输出电源模块):作为底盘主控板的电源管理中心,将电池电压转换为多路输出(如5V给传感器,3.3V给MCU,12V给外设),单芯片解决复杂的供电树需求。
运动控制:
- MA730(带ABZ输出的数字角度传感器):用于车轮的测速和里程计(Odometry)。其标准的ABZ增量输出可直接连接至MCU的编码器接口,方便实现传统的PID速度闭环控制。
- MP6543(12V/2A 3相功率级):作为单个麦克纳姆轮无刷电机的驱动器,支持PWM输入,控制逻辑简单,适合多轮独立驱动的分布式架构。
MP5038

具有 7 个可配置 PDO 和降负荷功能的 USB PD 源控制器
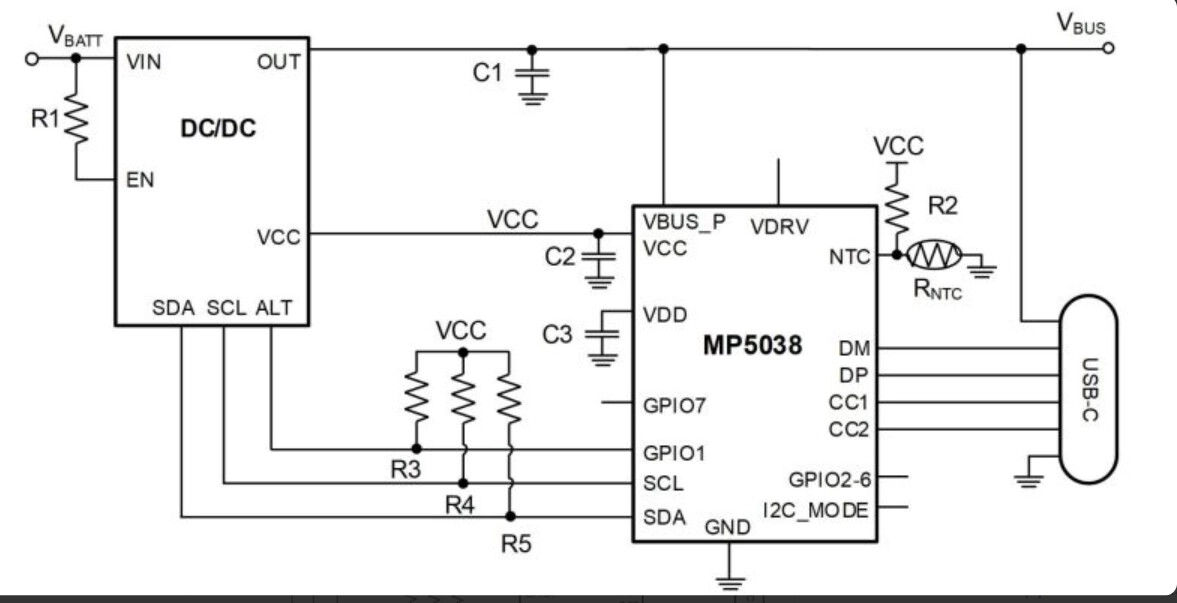
MP5038 支持高达 100W 的 PD 电源以及可编程电源,还有两个NTC引脚,4X4的引脚也非常的小
预发布新品 资源如DataSheet与封装 需要找MPS获得
MP4501

60V、USB Type-C 端口保护器,具有 OVP 和 IEC ESD 保护。3X3超小尺寸
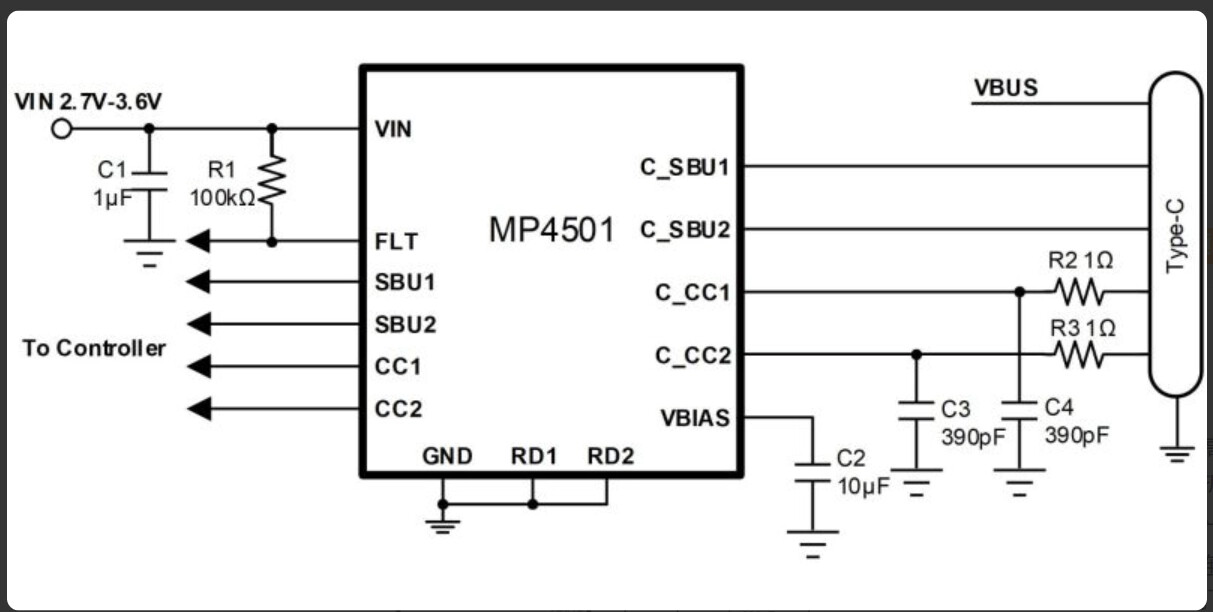
它可以提供 60V 短路至 VBUS 的过压保护 (OVP) 和 IEC 静电放电 (ESD) 保护。
MP4501 的外部 BOM 非常紧凑,同时还提供 OVP 故障指示和过温保护 (OTP)功能。
MPM54304

带 I2C 和 MTP 的 4V 至 16V 输入、四路 3A、3A、2A、2A 输出电源模块。
封装:超薄LGA(7mmx7mmx2mm)
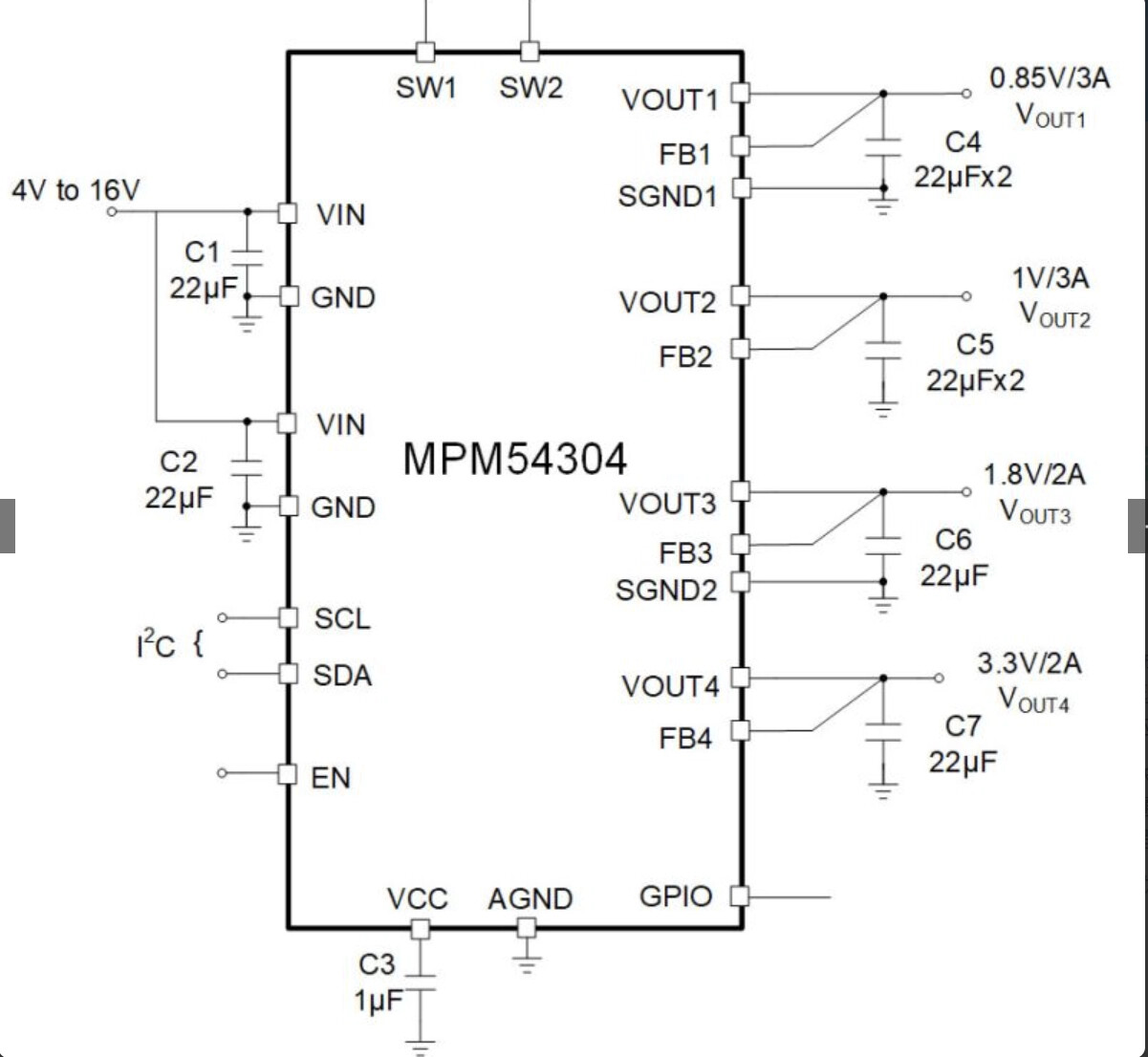
仔细看了规格书,我这里的选型似乎并不太准确
MA730

带 ABZ 增量和 PWM 输出的14位非接触数字角度传感器。
封装:QFN-16 (3mmx3mm)
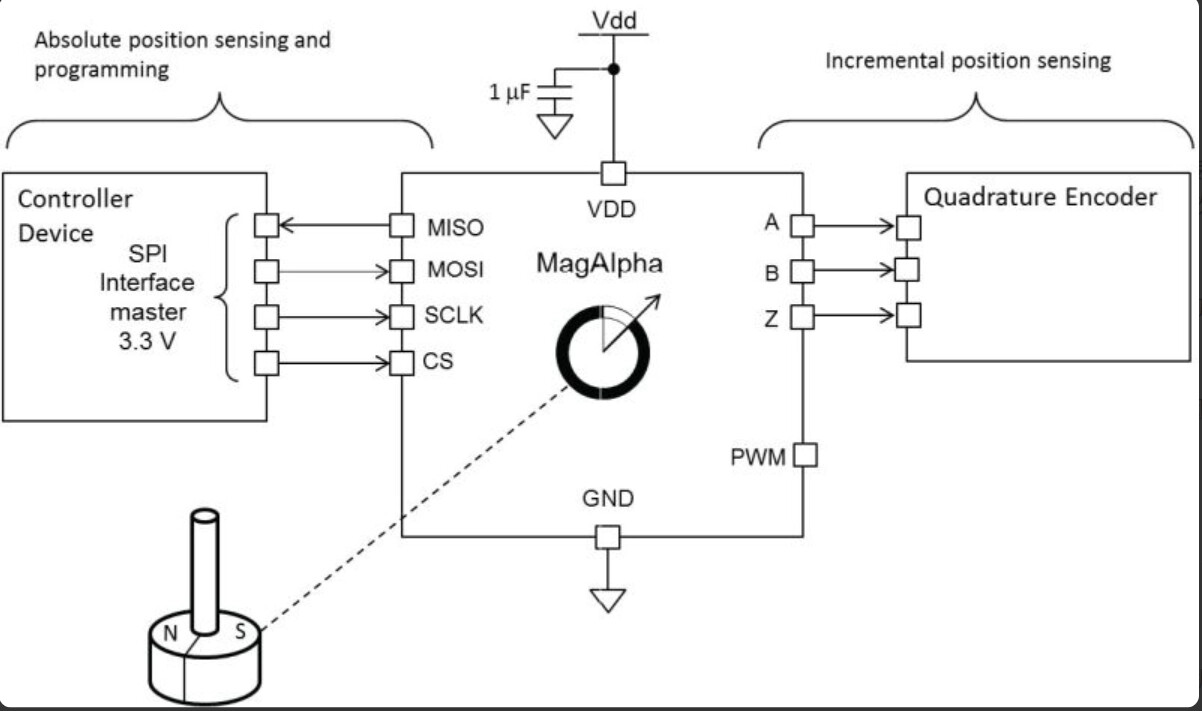
这个芯片可以检测旋转轴上永磁体的绝对角度位置
同时这个芯片具有存储器用于存储配置参数,包括基准零度角位置、ABZ 编码器设置和磁场检测阈值等。
还可以感应轴向位移,可以感应到电机磁体安装位是否失效,非常优秀
MP6543
支持 ENBL 和 PWM 输入的 12V/2A 3 相功率级
封装:QFN-24(3mmx4mm)
MP6543 系列产品均为 3 相无刷直流电机驱动器
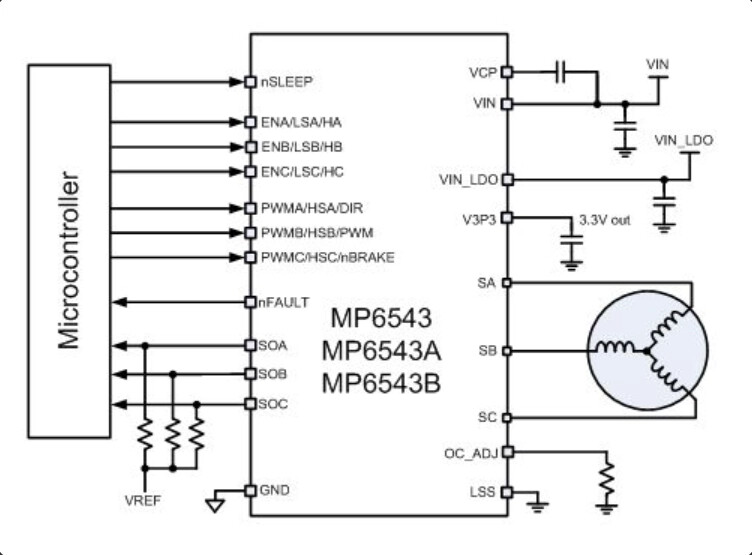
MP6543:ENBL 和 PWM 输入,而MP6543A有LS 和 HS 输入。MP6543B有霍尔信号输入
此次的物料为MP6543,将要配合MA730使用。
本次大赛的其他IC也非常优秀,写方案时并没有把所有的IC都研究的很透彻,现在看来很多IC都想尝试一下比如MP2797,MA782,MPQ6547A-AEC1 等等有机会也会把他们设计进去