大家好,我这次参加 MPS 机器人模块设计大赛,准备做一个小型机器人单关节闭环驱动模块。
电机驱动模块作为2026年的项目, 确实比较“大众“了,其实这个项目想法的主要初衷:前前前阵子我在 TB 上刷到一个 35mm 左右的小云台电机,价格十分美丽,于是顺手买了俩。买回来以后一直没来得及玩,就在箱子里吃灰。正好这次看到 MPS 的机器人模块设计大赛,我又想起了这两个小电机。

于是就出现了这种情况:为了一小碟醋,决定下锅饺子。
既然要玩,那就干脆认真一点。我的想法是围绕这个小电机做一块完整的单关节驱动模块,把电源、三相无刷驱动、磁角度反馈和控制算法都放进去。后面如果调得顺利,它可以作为小机械臂、云台、灵巧手这类结构里的一个基础关节单元。
这篇算第一篇过程帖,先把项目目标、用到的 MPS 器件、目前进度和后续计划交代一下。另一个比较特别的点是:这次我准备从立项、调试到最终提交,全过程都让 AI 参与进来。当然,AI 只是帮我理思路、查问题、写记录,真上电、真焊板、真测数据还得我自己来。
一、先看整体方案
这块板子的目标是做一个完整的小型闭环驱动单元,主要分成几块:
-
电源部分,负责把输入电源转换成板上需要的低压电源;
-
三相驱动部分,负责带动 BLDC/PMSM 小电机;
-
磁角度传感部分,负责知道电机或者关节现在转到哪了;
-
MCU 控制部分,负责采样、控制算法、保护和通信;
-
电机与结构件,负责最后真的动起来。
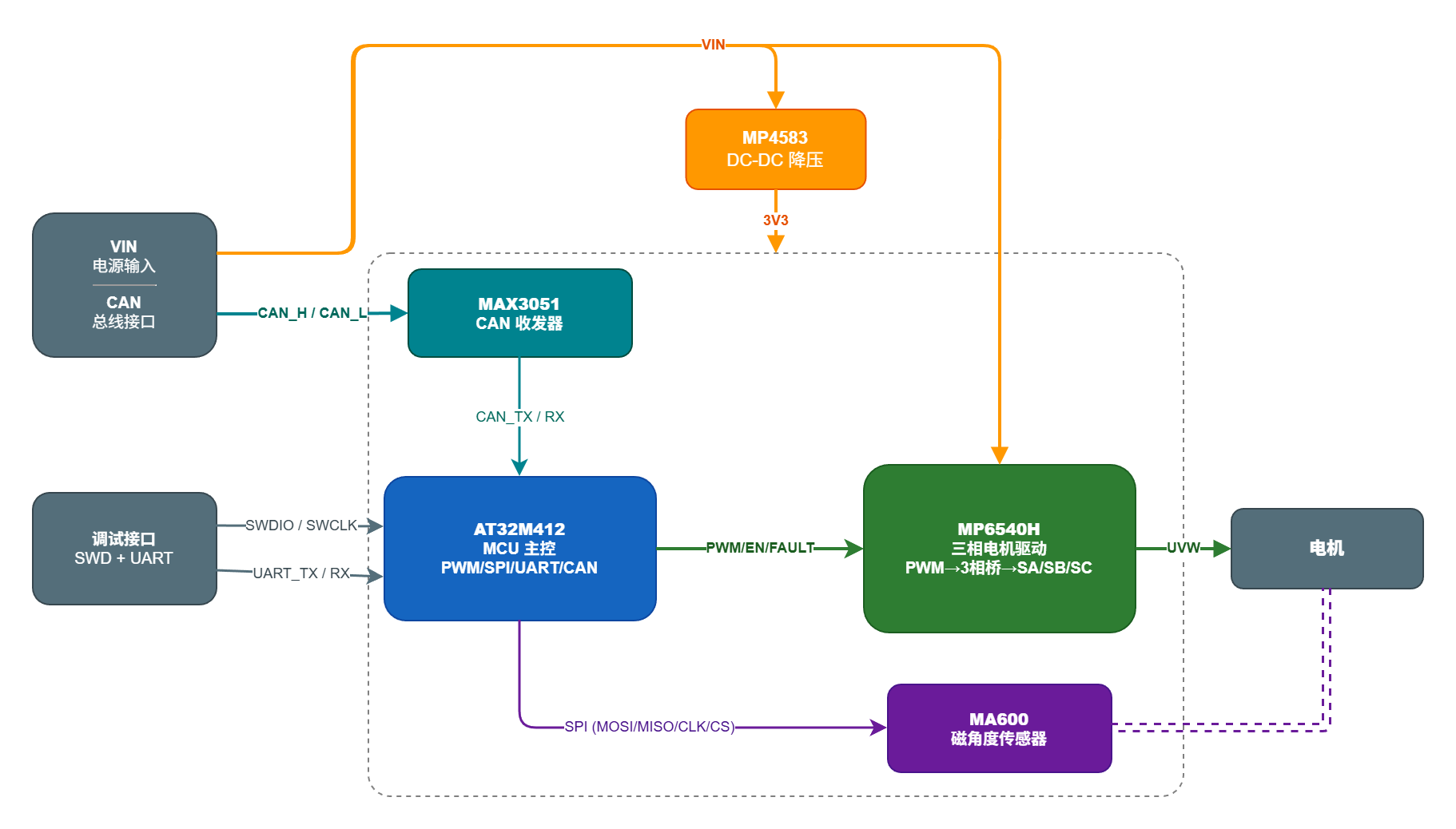
嗯, 这个图是 AI 帮忙画了一版结构框图,主要是用来展示下模块关系。
二、这次用到的 MPS 器件
这次选了三颗 MPS 器件,刚好能把电源、驱动、传感这三块串起来。
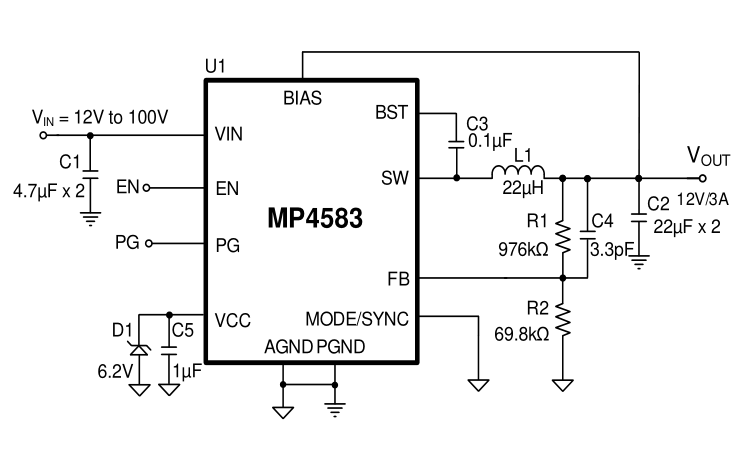
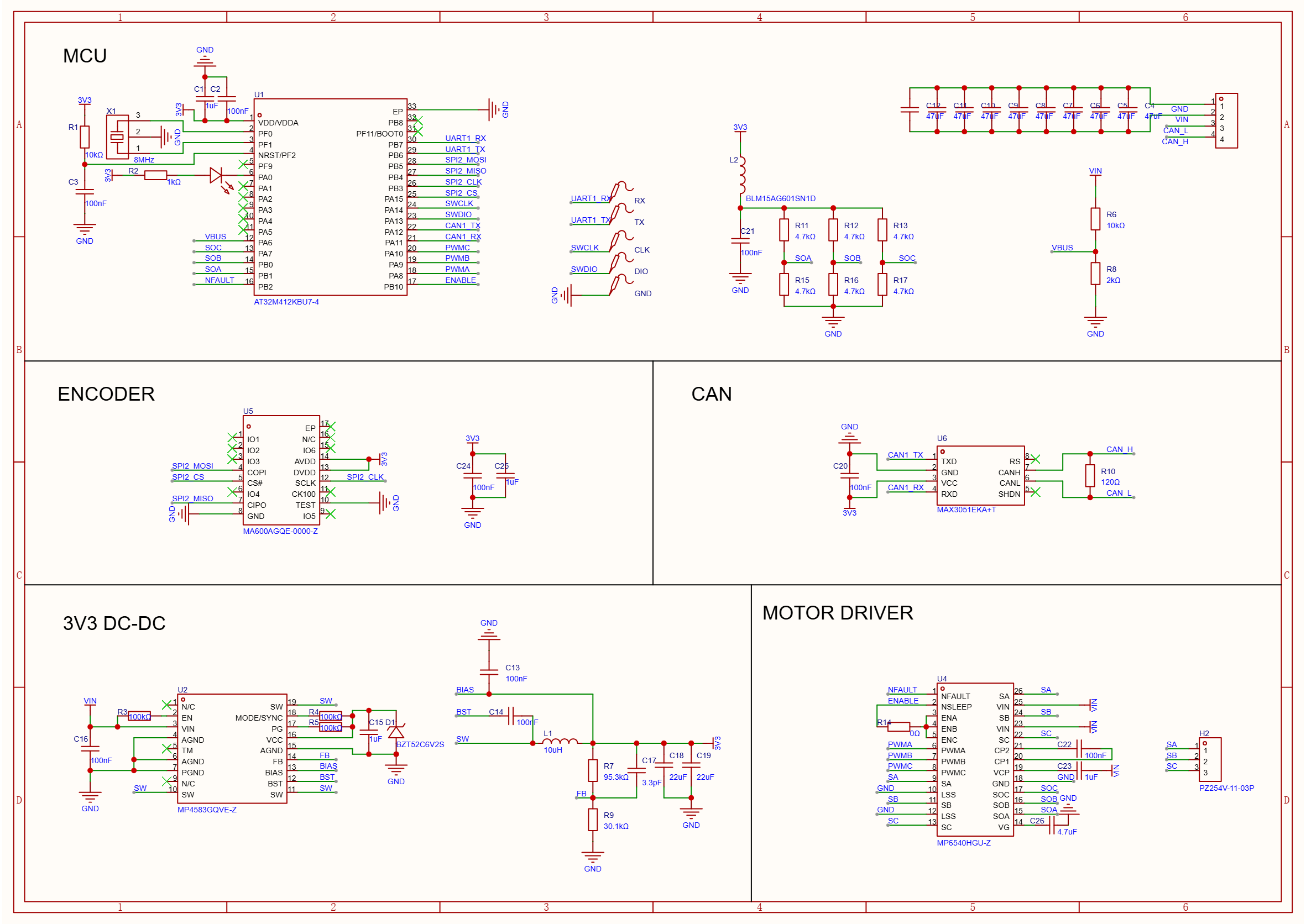
1. MP4583:负责板上供电
MP4583 用在输入侧做同步降压。我的目标是让模块能适配比较常见的机器人供电场景,然后给 MCU、传感器和驱动相关电路提供稳定低压电源。
后面上电调试时,我会先测它的输出电压、空载电流、纹波和温升。毕竟电源不稳,后面电机控制写得再花也白搭。
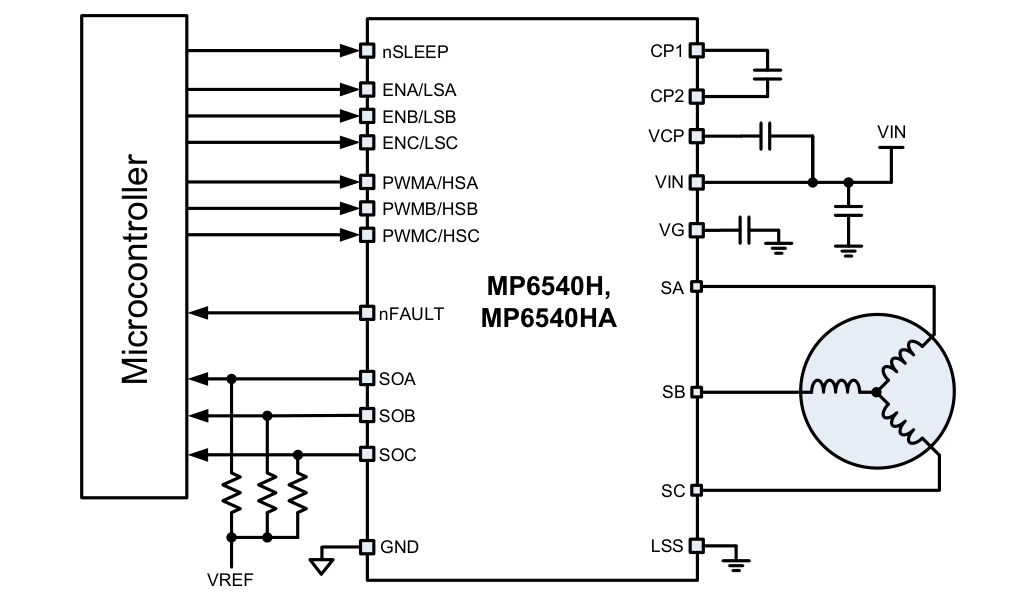
2. MP6540H:负责三相电机驱动
MP6540H 是这块板子的三相功率级,用来驱动小型 BLDC/PMSM 电机。后面不会一上来就闭环乱冲,计划先从低压、限流、低占空比的开环测试开始,确认相序和驱动链路没问题,再慢慢加上传感器反馈。
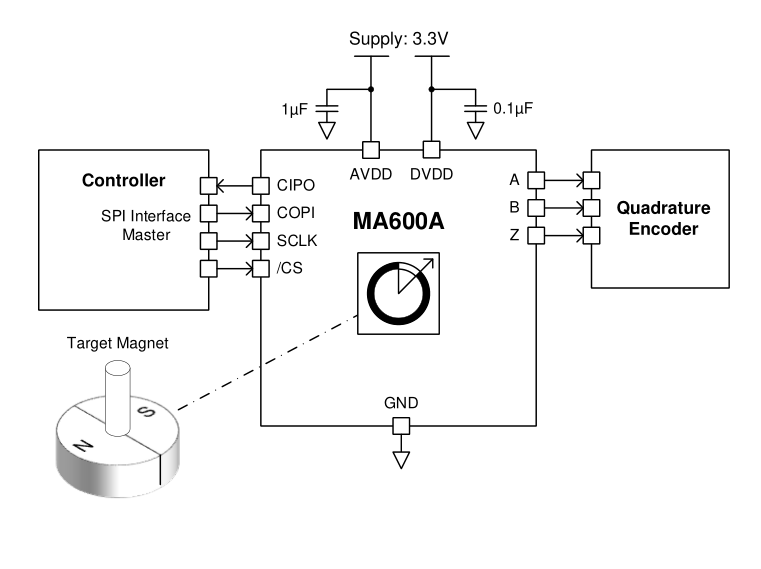
3. MA600A:负责角度反馈
MA600A 是磁角度传感器,用来读电机转子或者关节位置。这个芯片是后面做闭环的关键,不然电机转没转、转到哪、有没有跟上目标,全靠猜就太玄学了。
后续我会先验证它的通信读取,再看静止抖动、旋转连续性和零点校准。等这块稳定以后,再上速度环和位置环。
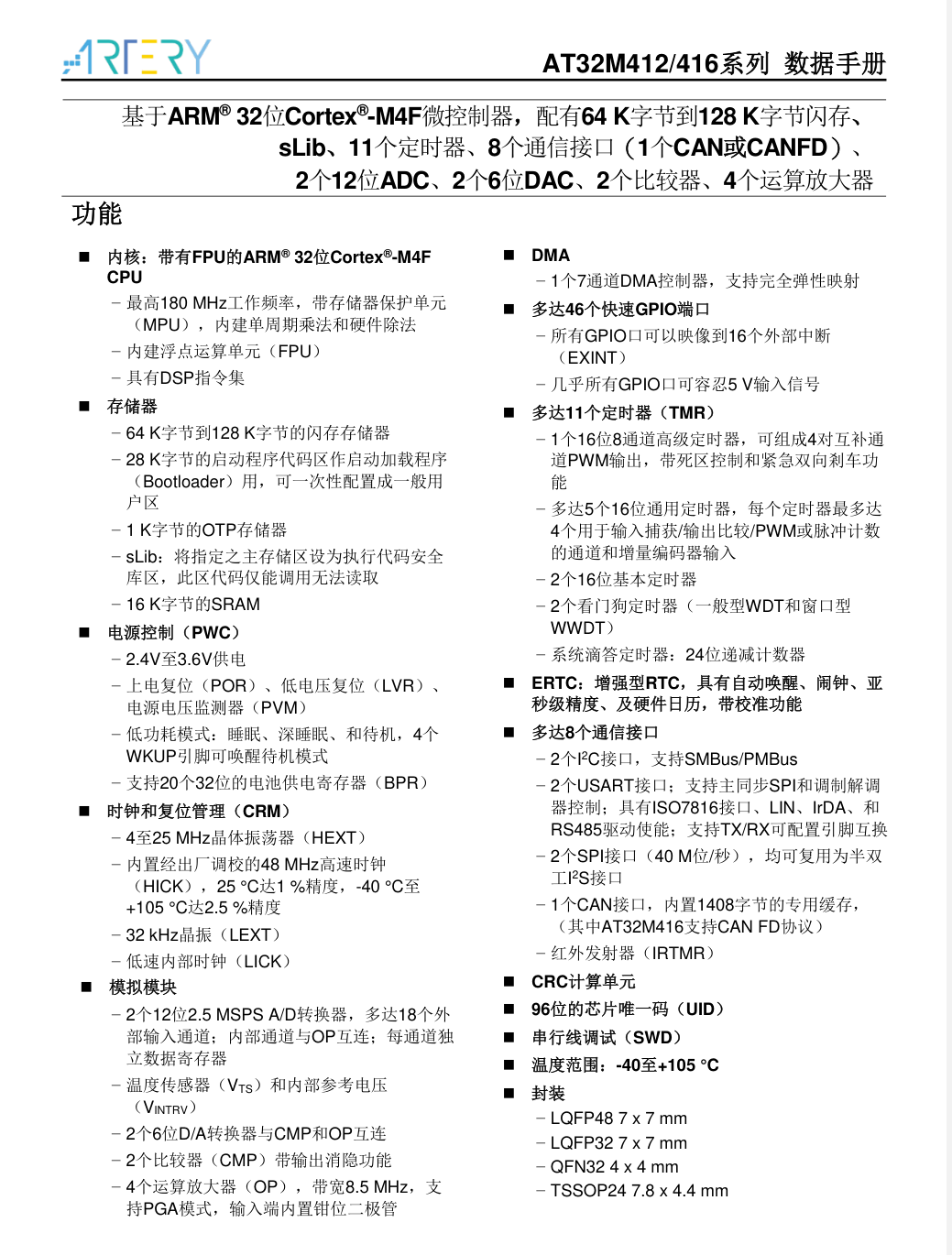
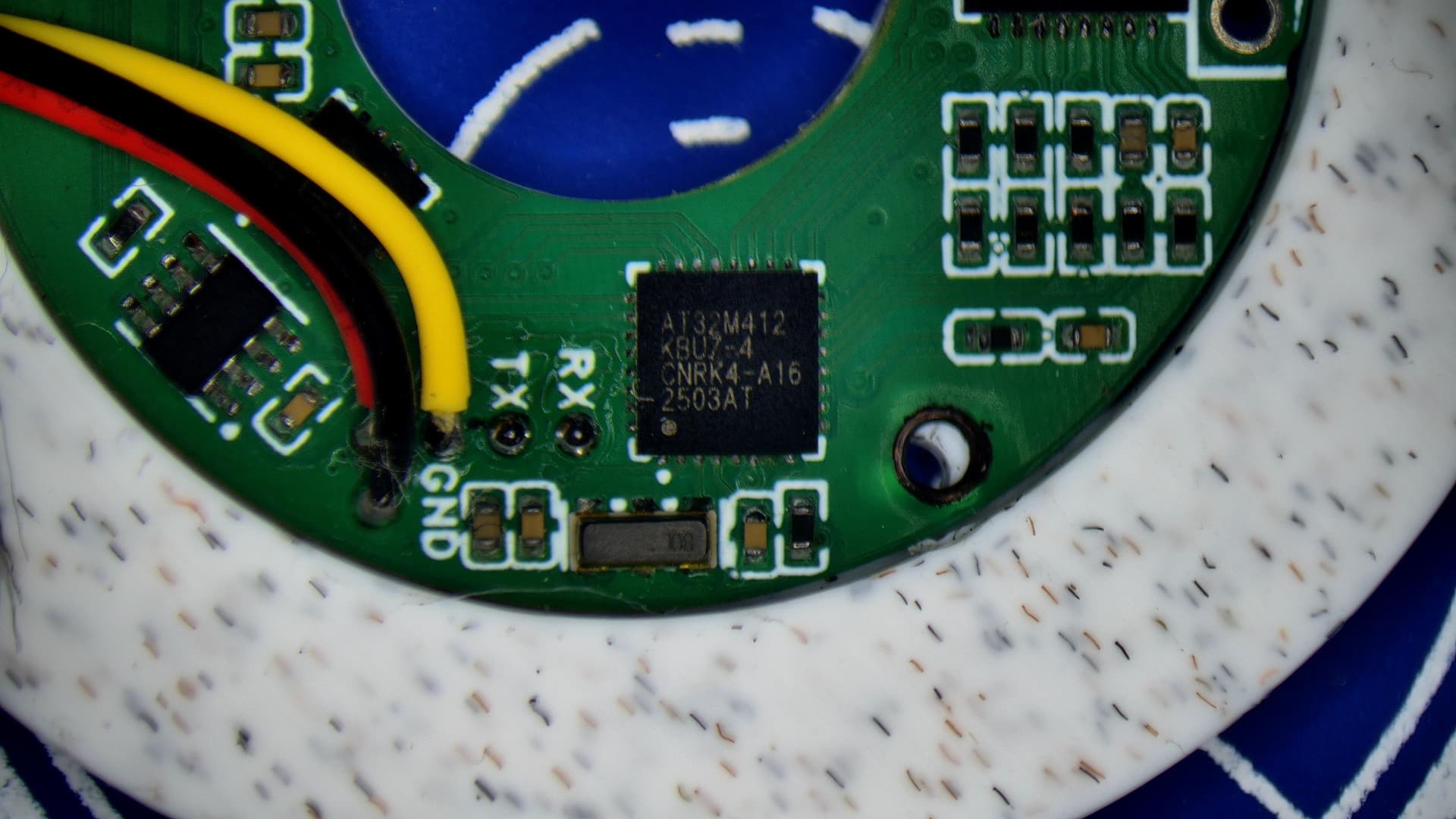
MCU选了ARTERY的AT32M412, 封装小性能足价格便宜
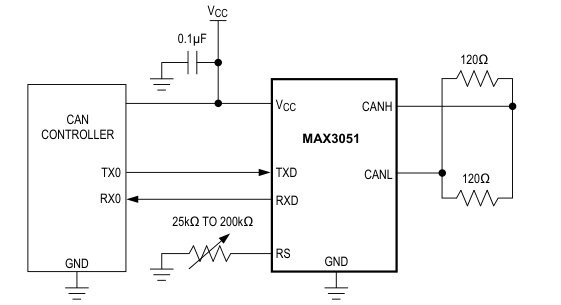
通讯使用can,便于后续扩展
三、我打算实现什么
先把目标列清楚,免得后面越做越飘。
这个模块最终希望做到:
-
能稳定驱动小型三相无刷电机;
-
能通过 MA600A 读取角度位置;
-
能做速度闭环和位置闭环;
-
有基础保护逻辑,比如过流、过压、堵转、传感器异常;
-
能独立做一个单关节演示;
-
把调试过程、测试数据和 AI 参与过程都记录下来。
比赛最后看的是作品,不是 PPT,所以我会尽量把每一步都落到实物测试上。能跑到哪就写到哪,数据好看就展示,数据翻车也记录,反正调电机大概率不会一路丝滑。
四、目前进度
目前硬件这边已经走到样板阶段:
- 原理图已经画完;
-
PCB layout 已经完成;
-
样板已经做出来,并且牛马手工焊接完成;
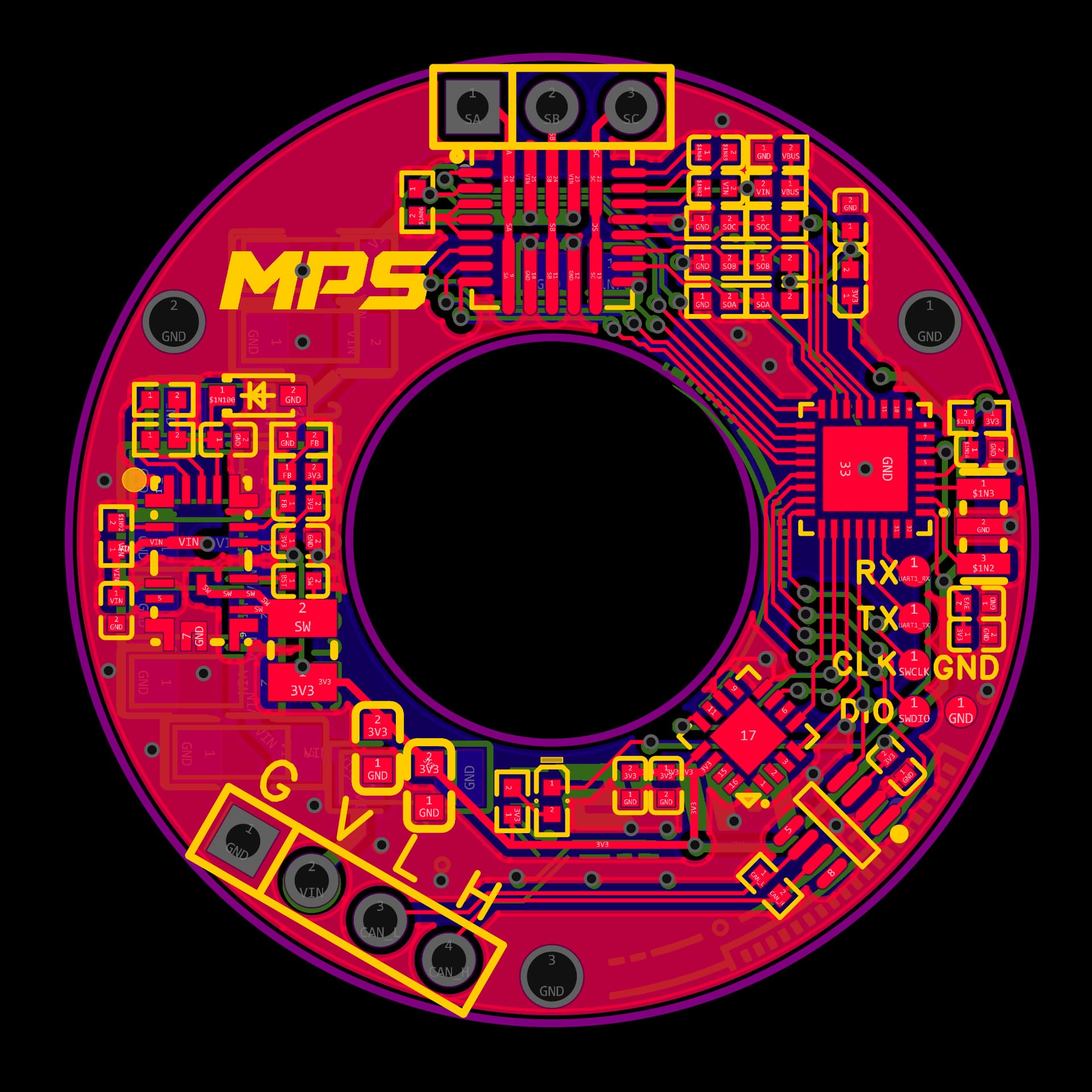

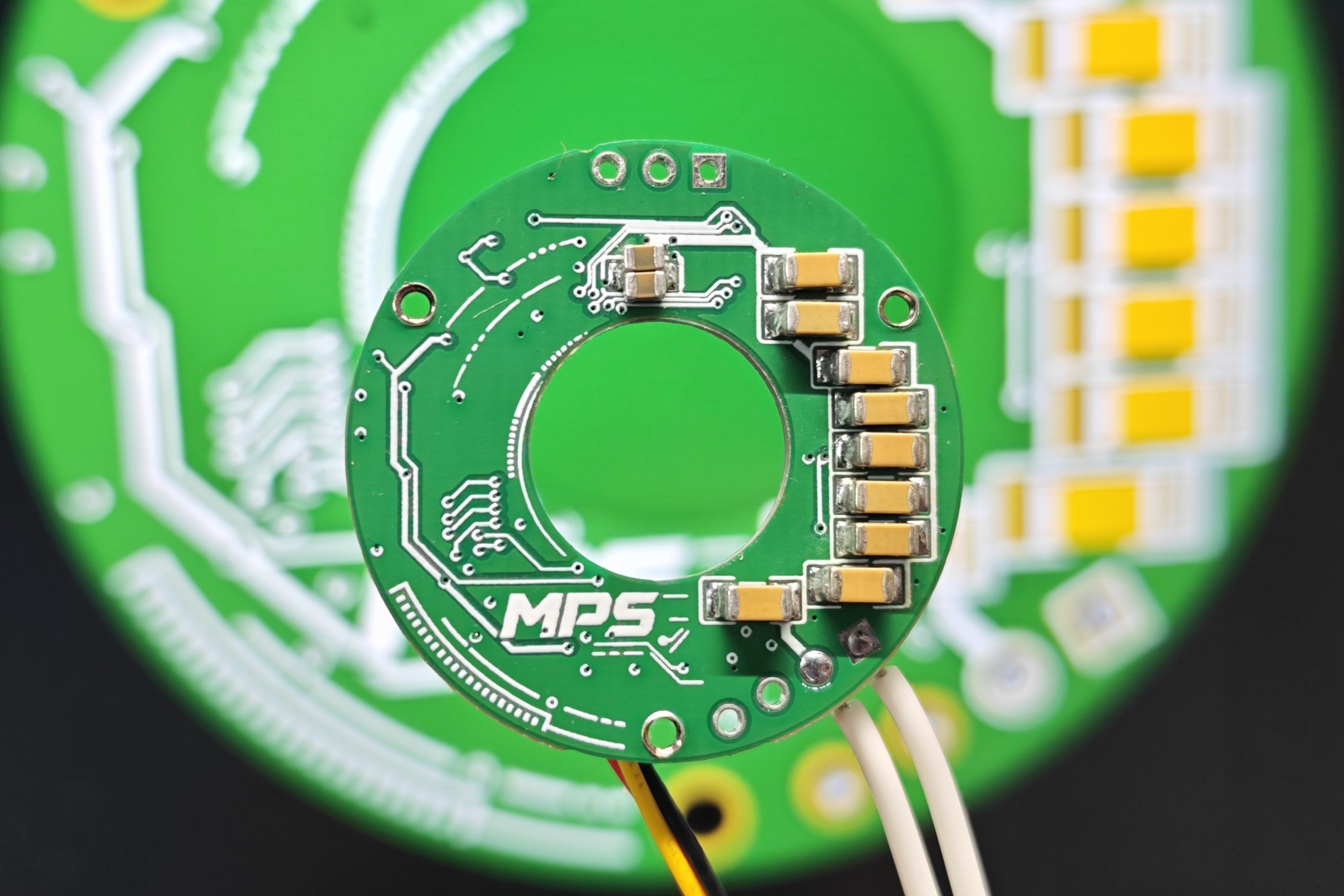
下一步就是 Bring-up。这里我会比较保守:先不接电机,先做外观检查、断电阻抗检查、限流上电、电源输出检查、MCU 最小系统测试,再去碰 MA600A 读取和 MP6540H 驱动。
毕竟电机可以晚点转,板子不能先走。
五、这次 AI 准备怎么用
比赛规则里提到,合理使用 AI 工具完成作品设计可以作为附加分。正好我也想试一下:如果把 AI 当成一个随叫随到的工程助手,它到底能在这种小项目里帮到什么程度。
目前我给 AI 安排的活大概是这些:
-
帮我拆比赛规则,看最终作品帖必须交什么;
-
帮我写开发计划、调试记录表、测试报告模板;
-
根据芯片资料整理上电检查清单;
-
调试遇到异常时,帮我按现象梳理排查顺序;
-
帮忙整理测试数据和过程帖;
-
最后辅助写演示视频脚本和项目总结。
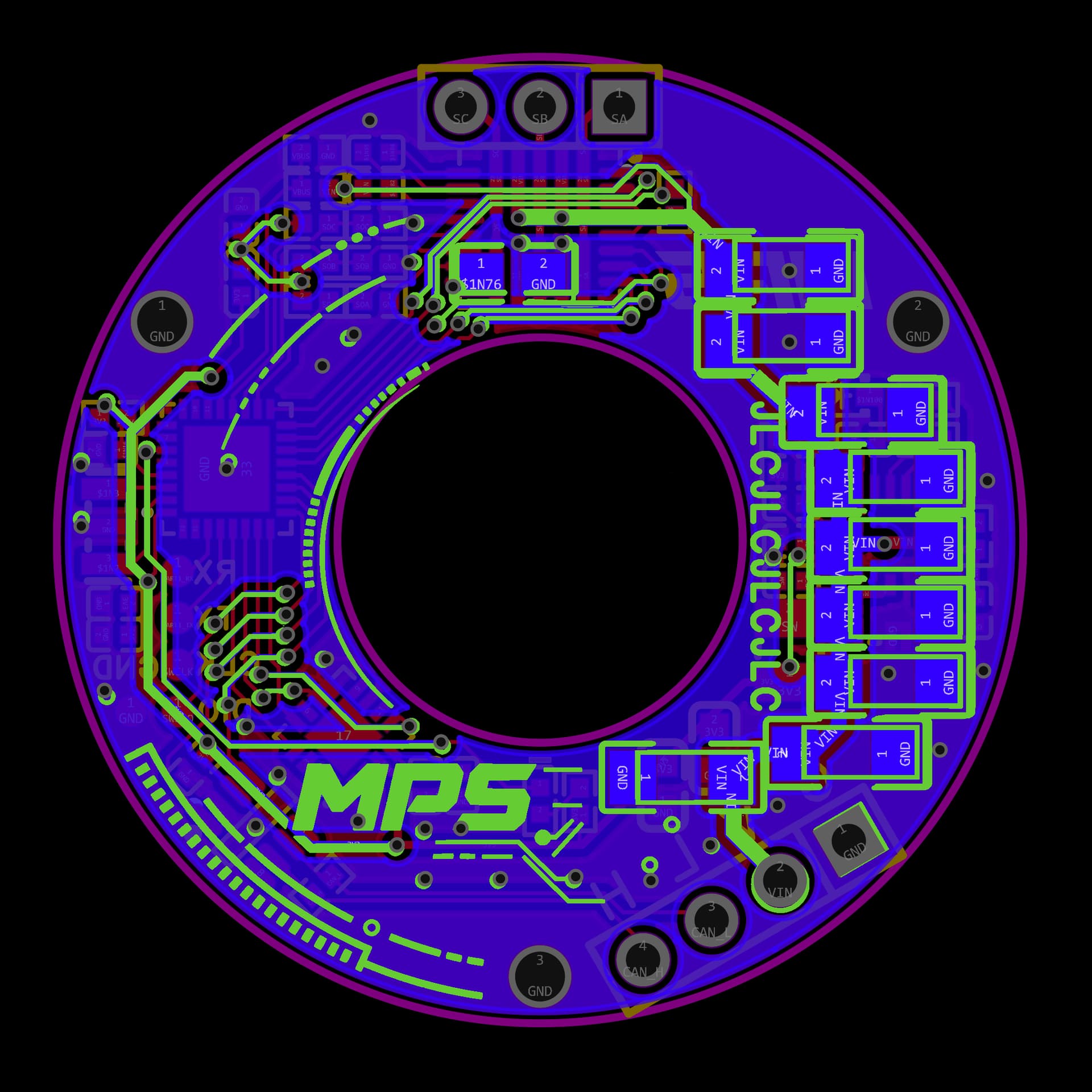
但边界也得说清楚:AI 不负责替我“宣布成功”。硬件设计貌似还没有很好的AI工具可以直接搞,所以前面我先肝了一个晚上的硬件原理图+layout, 当然AI在过程中给我打了一些辅助. 比如背面的丝印图,就是AI给我画的.(感觉还可以哈)
然后AI没有也手, openclaw的触手也伸不出电脑. 调试过程, 有没有焊错、电源有没有起来、电机有没有真转、角度数据稳不稳,这些都要靠牛马实测。AI 给的建议我会记录下来,但采不采纳、怎么验证、结论是什么,都以实际测试为准。涉及芯片参数和极限条件的地方,也以 MPS 官方 datasheet 为准。
我现在已经建了几份记录文件,包括 AI 使用记录、调试记录、测试报告和素材清单。后面每次关键调试,我会尽量记录:
-
当时遇到什么问题;
-
AI 给了什么建议;
-
我采纳了哪些,否掉了哪些;
-
最后怎么测、结果是什么。
这样后面写总结也不至于全靠回忆。工程项目最怕“当时我好像是这么干的”,听起来就不太妙。
六、后面准备怎么更新
后续我大概会按这个节奏更新:
-
样板上电和电源检查;
-
MA600A 角度读取与校准;
-
MP6540H 电机开环驱动;
-
速度环和位置环闭环控制;
-
保护功能和性能测试;
-
应用场景演示;
-
最终功能演示视频和项目总结。
下一篇如果不出意外,会记录首次上电、MP4583 输出检查、MCU 最小系统验证,以及 MA600A 通信读取准备情况。
如果出了意外,那下一篇可能就是“我如何优雅地排查一块板子为什么不高兴”。也挺符合真实开发。
七、先立个 flag
这个项目我不想只停在“画了一块板子”的程度,最终还是希望它能真的带着小电机稳定跑起来,能做闭环,能有个像样的关节演示。
后面我会继续更新过程。也欢迎大家拍砖,尤其是无刷电机控制、磁角度传感器安装、FOC 调试、MPS 器件应用这些方向。有经验的朋友多指点,我这边也会尽量把踩坑过程写出来,争取让这碟醋最后真的配上一锅能吃的饺子。