1. 前言
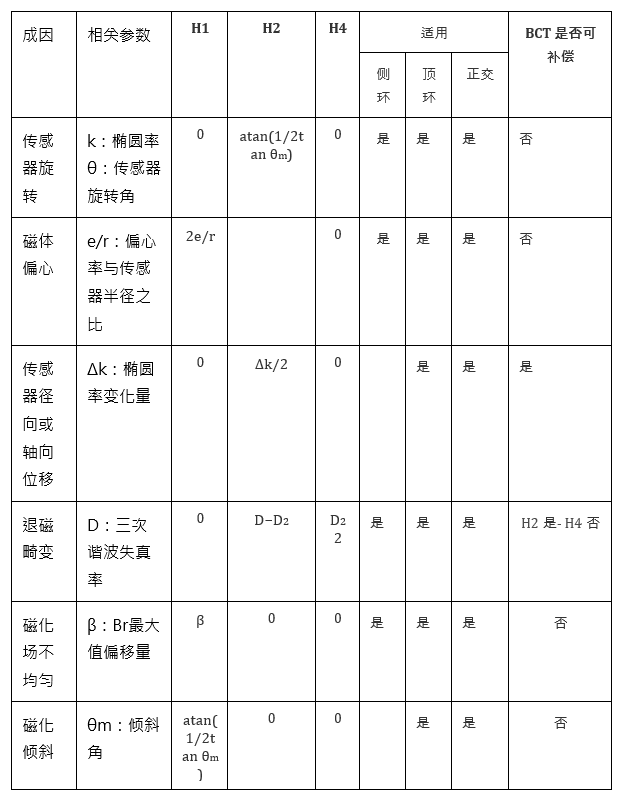
将 MagAlpha 传感器应用于侧轴配置时,需要考量若干项准则,以确保获得高度线性的输出结果。MagAlpha 角度传感器内置了一项线性化功能(称为“BCT”),用于解决传感器感测到的磁场两个正交分量在磁体旋转一周过程中幅值不一致的问题。然而实际情况表明,传感器或磁体位置上的某些缺陷,抑或是磁体的充磁方式存在瑕疵,都可能产生无法通过调整 BCT 功能来补偿的误差。本应用说明将阐述在侧轴配置下需要重点关注的各项特性,并基于对现有缺陷的认知,预估可达到的线性度水平。此外,本文亦可为制定机械及磁场公差规范提供参考依据。
1.1 理想情况
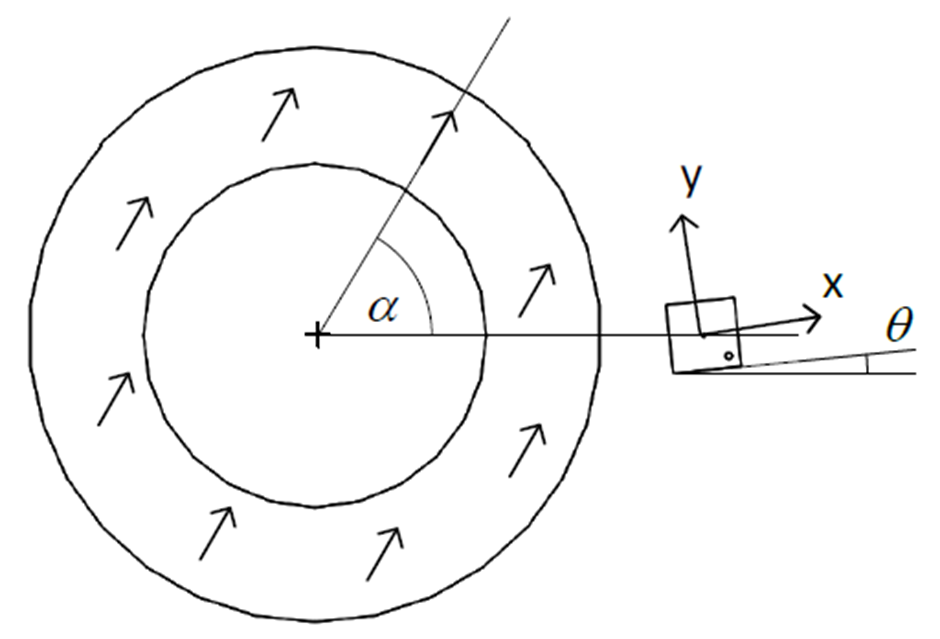
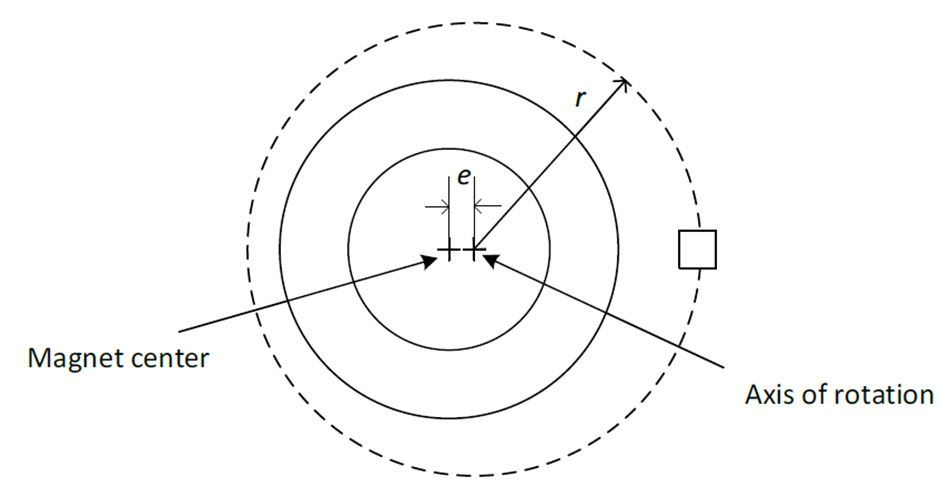
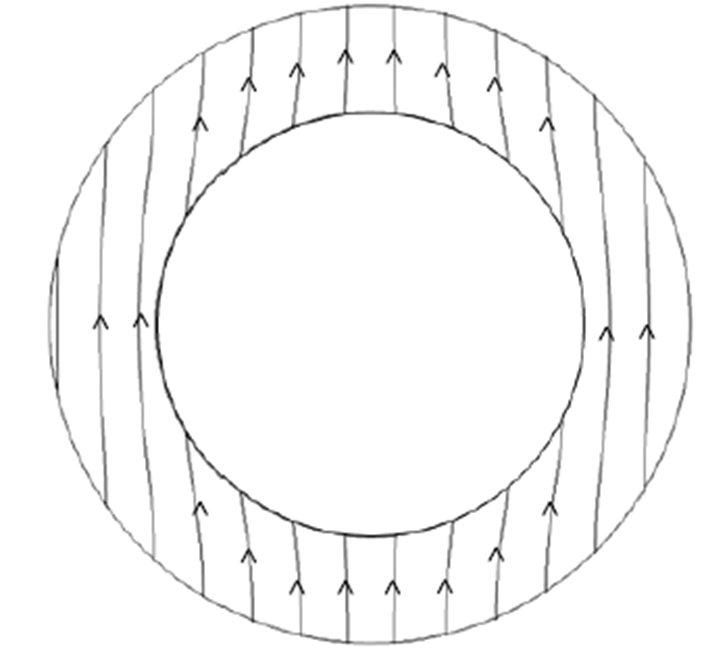
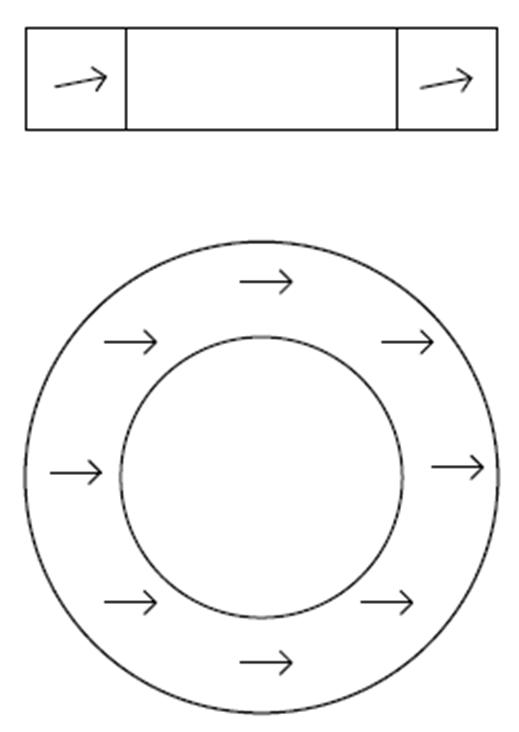
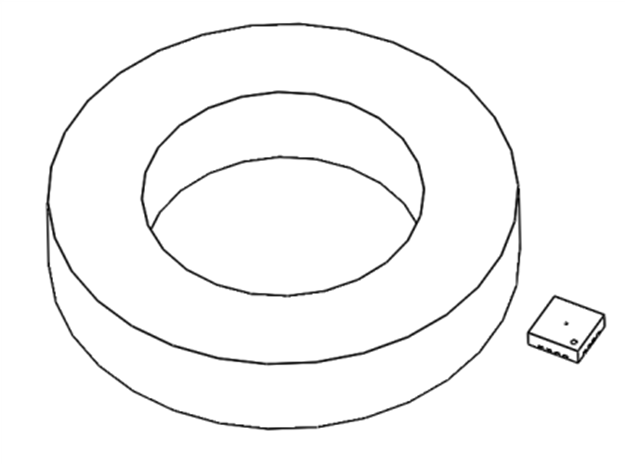
由均匀磁化的有限圆柱体所产生的磁场,沿以该磁体为圆心的圆形轨迹(见图1)分布时,是角度的正弦函数。
图1 均匀磁化圆环外部的磁感线
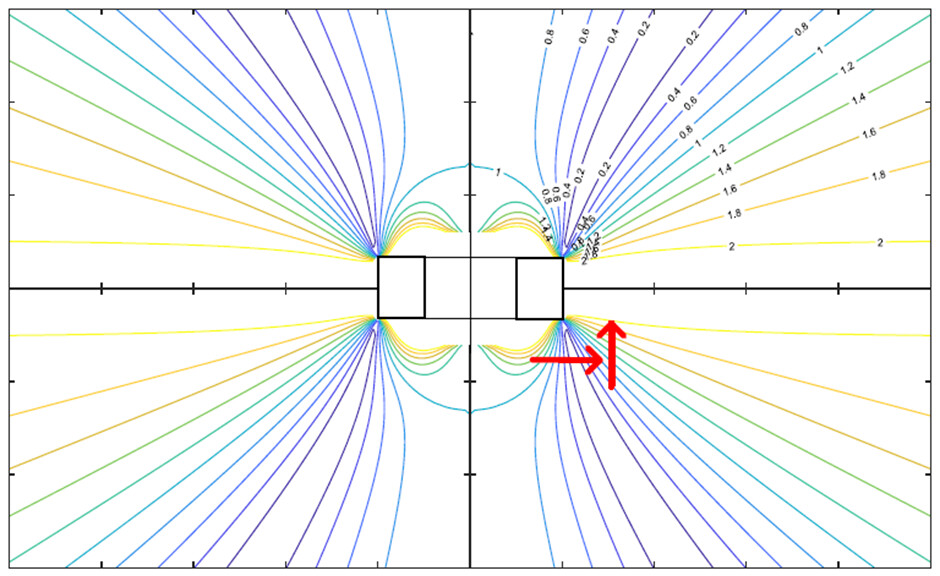
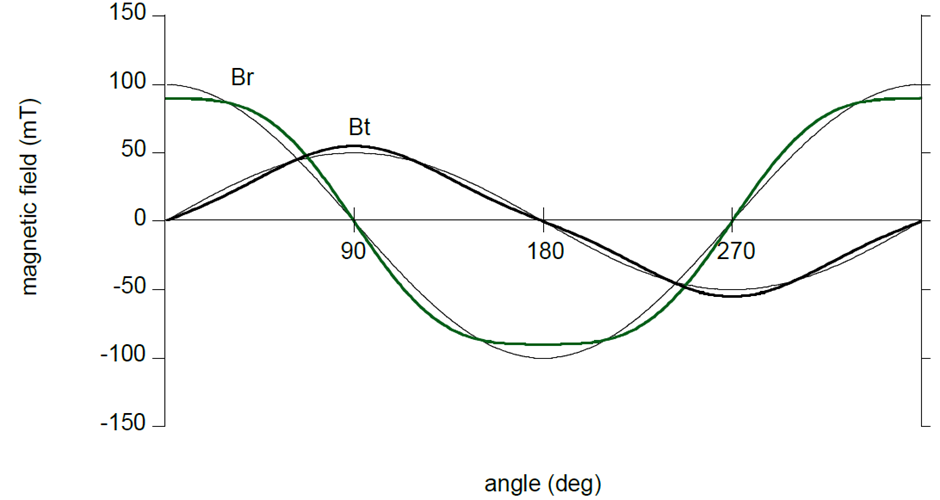
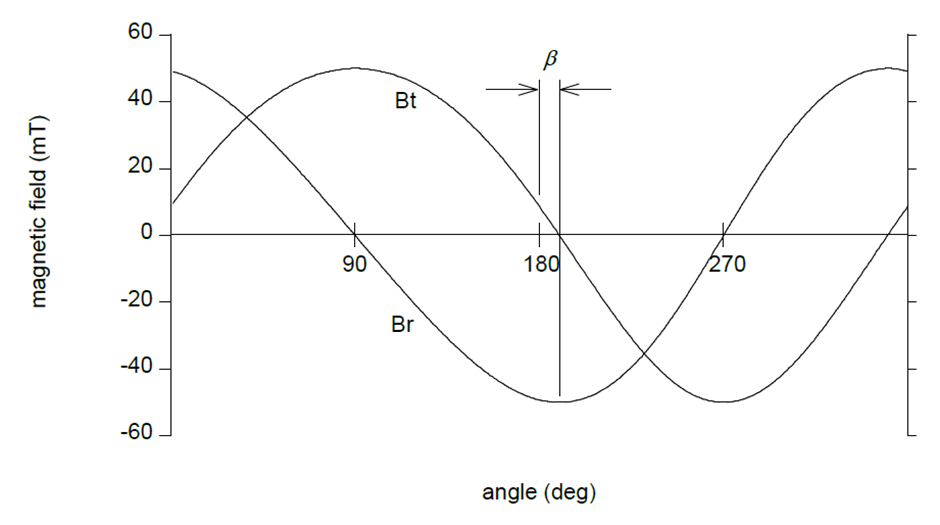
图2 沿环形轨迹测得的磁场径向分量与切向分量
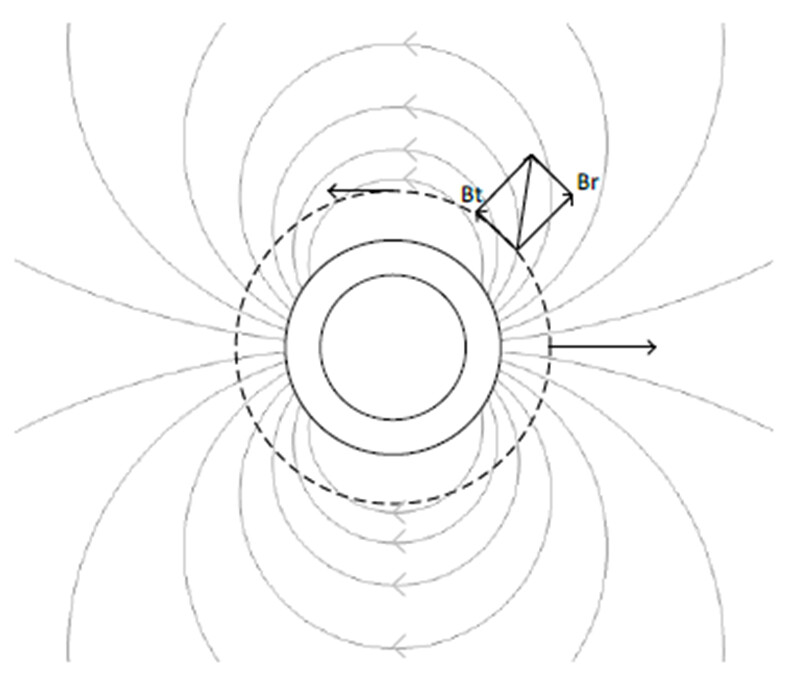
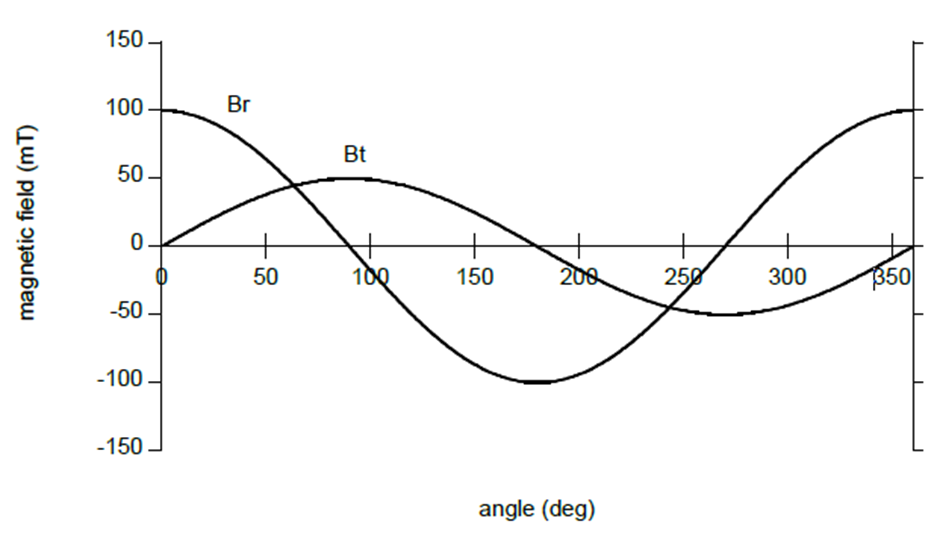
对于高度有限的磁环,其径向分量 Br 和切向分量 Bt 的幅值通常并不相等,即 k≡Br/Bt≠1。关于 Br 和 Bt 的解析表达式,可参考文献 [Caciagli et al. Journal of Magnetism and Magnetic Materials 456 (2018) 423-432]。由于幅值不等,会导致传感器输出呈现非线性特征(即所谓的“椭圆”误差)。该误差曲线本质上包含一个二次谐波分量(即在完成一次完整的旋转周期内,会呈现出两个正弦波周期)。通过调整径向灵敏度与切向灵敏度之间的比例,即可轻松校正这一误差。在 MagAlpha 系列产品中,该比例由参数“BCT”控制。有关 BCT 参数调节的更多详细信息,可查阅任意一款 MagAlpha 产品的数据手册。
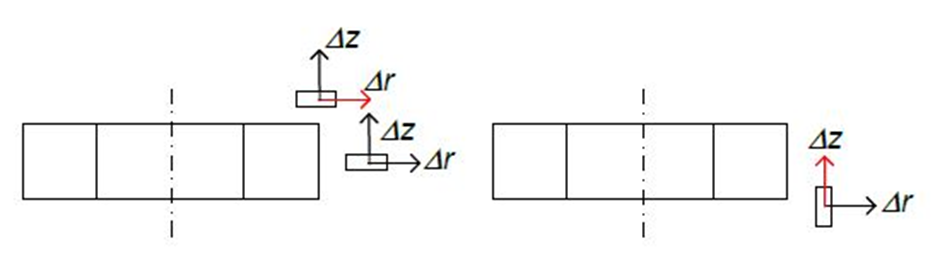
所谓“侧轴”配置,是指传感器未位于旋转轴线上的任何布局形式。图3展示了三种典型的侧轴配置方案。
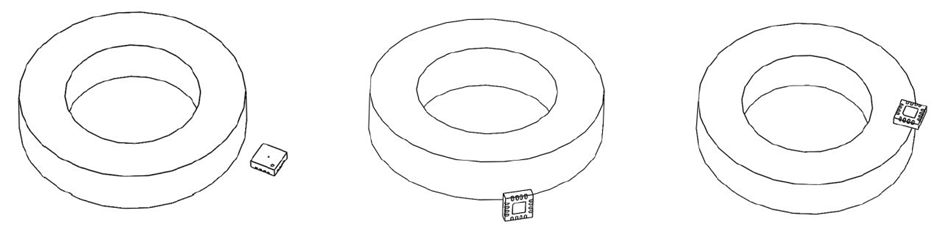
图3 不同的侧轴配置(左侧:侧环式;中间:正交式;右侧:顶环式)
1.2 实际情况
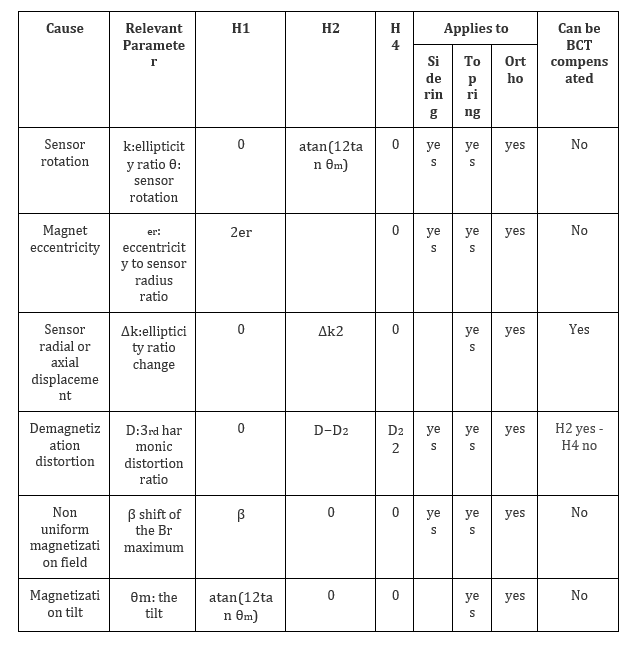
在实际系统中,某些缺陷会导致非线性误差,而这些误差是无法通过任何BCT调整来补偿的:
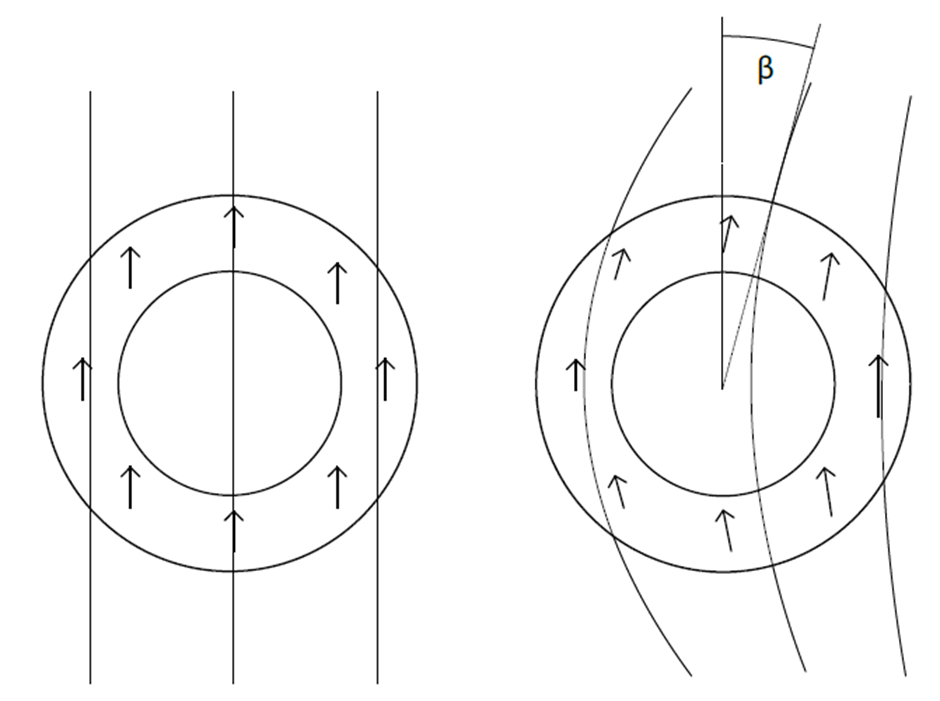
• 位置缺陷:由于系统机械公差导致磁体和传感器的位置偏离理想状态
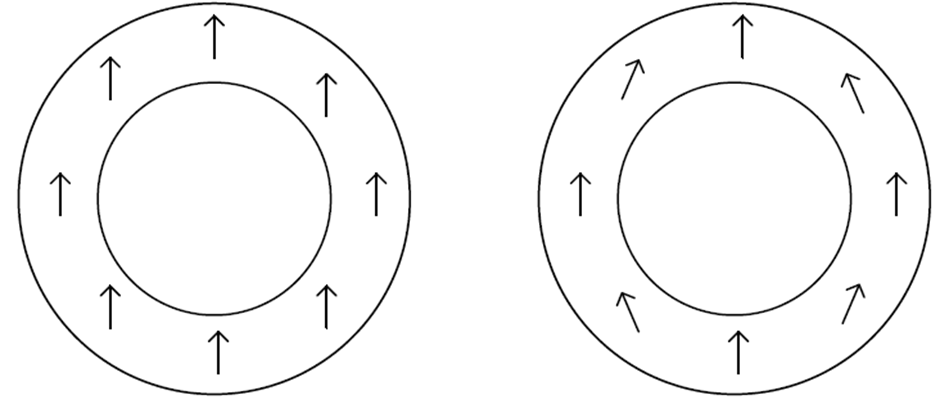
• 磁性缺陷:磁体的磁化状态偏离理想状态
如果由此产生的误差曲线具有非二次谐波的阶次,那么显然无法通过BCT设置来补偿该误差。即使误差属于二次谐波,但若其相位与因k值(磁场比率)偏离1而产生的误差曲线相位不一致,同样无法通过BCT设置进行补偿。此外,即便某种误差可以通过BCT调整来补偿,但由于此类误差通常在不同磁体之间又存在差异,因此仍需生产过程中单独校准。