当步进电机转子遇到失步,甚至更加恶劣的堵转,又没有后续的诊断和解决策略,那么终端产品将无法发挥出所需的实力。
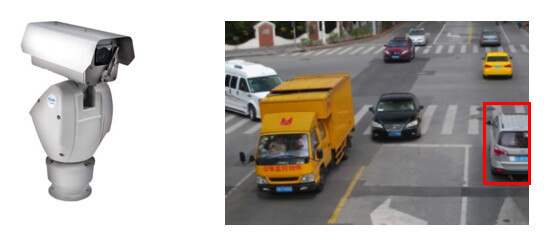
例如,在安防行业的球机应用中,如果球机摄像头在旋转过程中遇到失步和堵转的问题,就无法准确捕获到所需位置的图像。
在打印机的应用中,如果打印的转轴遇到了旋转失步或者堵转的问题,打印出来的纸张文字间距就会不均匀。
所以步进电机想要在电机领域内更进一步,堵转 和失步 的问题是需要突破的一大难关,那么它该何应对呢?在说明这个问题之前,我们还是需要进一步认识步进电机的控制系统和特性![]()
点击上图或下方链接可跳转至视频
视频文字部分:
步进电机开环位置控制系统
步进电机开环位置控制系统主要由三部分构成: MCU (进行步进脉冲和方向指令发送)、双全桥驱动 以及步进电机 (见图1)。
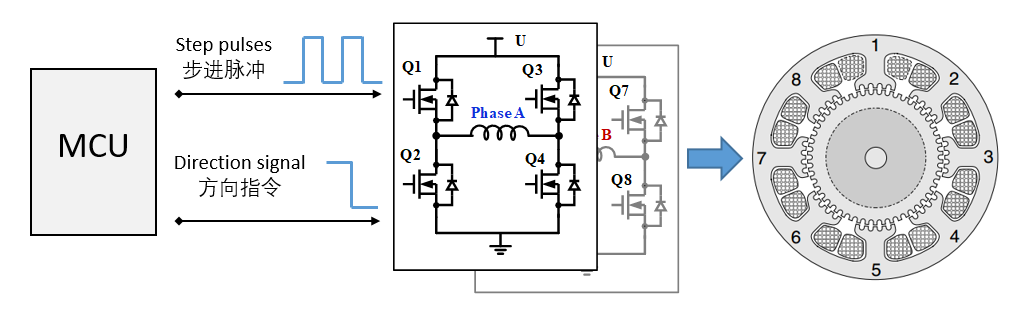
图1 步进电机开环位置控制系统框图
MCU发送步进脉冲和方向指令,双全桥驱动根据控制指令输出功率,驱动步进电机旋转。MCU每发送一个脉冲,步进电机就按照步进模式旋转一个电气角度,所发送的脉冲频率越高,相应的步进频率也就越高,步进电机就旋转得越快。每秒的脉冲数量称之为PPS(脉冲频率),代表了步进电机的旋转速度。
步进电机能够输出的负载转矩,由两个参数来表示:牵入转矩和牵出转矩。这两个参数可以在坐标轴上清晰地表现出来,以PPS为横坐标,动态转矩为纵坐标,步进电机会获得牵入转矩和牵出转矩曲线(图2)。
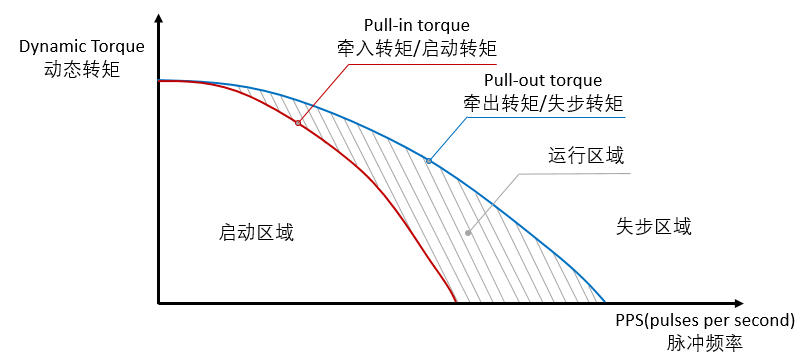
图2 步进电机牵入/牵出转矩曲线
牵入转矩
指步进电机在不失步的情况下能够按照给定的步进频率,克服转子惯量,负载和摩擦力的情况下,确保启动的加速转矩。只要负载大小在牵入转矩的曲线区域内,也就是启动区域内,就能够进行正常的起步。
牵出转矩
指步进电机在不失步的前提下,能够连续恒速运转时,转轴端可以提供的最大转矩。
在牵入和牵出转矩曲线之间是步进电机的带载连续运行区域。如果负载或者步进频率进一步增加,步进电机就会无法提供相应的转矩,就会处于失步区域。这是因为在更高的步进频率或者更重的负载情况下,步进电机转子实际的转动频率无法跟上定子磁场变换的频率。如果负载在此时更进一步的加重,严重情况下,将会导致转子直接堵转。
那么在实际的应用中,将如何应对步进电机的失步和堵转呢?
“乾坤大挪移”
为了应对失步和堵转,步进电机需要更进一步地练习新的功法——“乾坤大挪移”。
该功法主要分为外功招式和内功心法。外功招式就是有感控制,内功心法则是无感的诊断方法。本篇内容主要是对有感控制 进行详细地介绍,无感的诊断方法将会出现在下篇内容中。
有感控制
指步进电机在不失步的情况下能够按照给定的步进频率,克服转子惯量,负载和摩擦力的情况下,确保启动的加速转矩。只要负载大小在牵入转矩的曲线区域内,也就是启动区域内,就能够进行正常的起步。
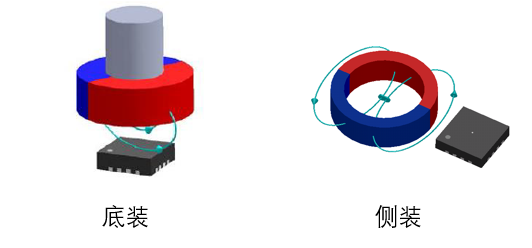
图3 磁编码器安装结构
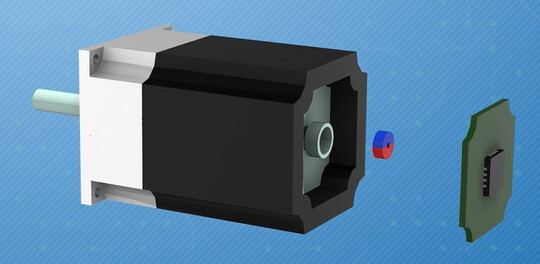
图4 步进电机磁编码器底装示意图
磁编码器能够输出多种角度信号形式,来满足不同要求下的应用。
A/B/Z 信号
A/B/Z信号是一种增量型的脉冲输出信号。(图5)
A相和B相信号会在旋转的每圈 (360°)输出固定数量的脉冲方波。磁编码器的分辨率越高,脉冲数目就越多。MCU通过对脉冲数目的捕获就能计算出步进电机转子旋转的角度大小,见公式(1)。
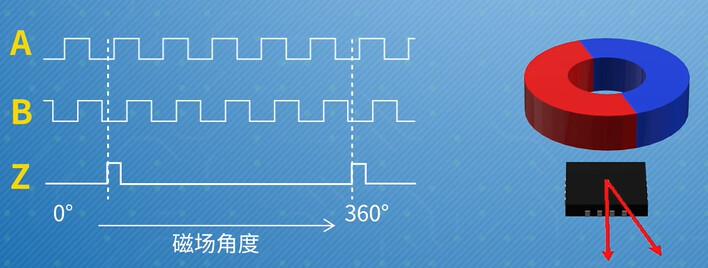
图5 A/B/Z 角度信号

公式(1)
其中,Angle为转子转过的角度,count为A相合B相的脉冲数目以及上升和下降沿总和, bit为磁编码器的分辨率。A相和B相信号在相位上会相差90度,通过对A相和B相信号之间相位角的超前或者滞后的检测,来判断转子是进行了顺时针还是逆时针的旋转。Z相信号在每圈只会输出一个脉冲,主要是用来做圈数角度的校准使用。
寄存器数值
角度信号也可以通过读取磁编码器寄存器获得(图6),这是一种绝对式的位置角度信号。无论转子停在哪一个位置,都能有唯一对应的磁场位置和角度信号。通过对读取到的值进行角度计算,就可以获得转子的旋转角度,见公式(2)。

公式(2)
其中,Register为读取的寄存器值大小,bit为磁编码器的分辨率。
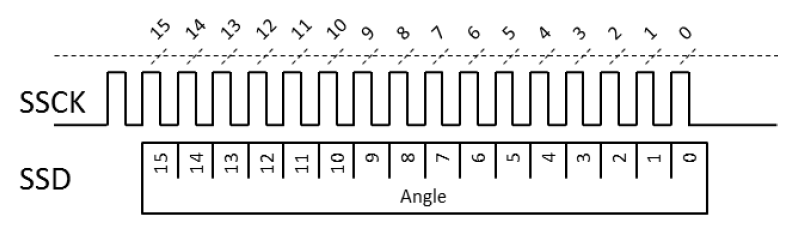
图6 角度寄存器
角度补偿
有了角度信息的输入,步进电机就仿佛知道了破绽所在。通过对比MCU输出的角度指令PPS和角度传感器反馈的角度信号,就能知道步进电机目前是否处于失步和堵转状态。通过发送补偿指令,控制步进电机转动,进行角度补偿。
控制的方式可以是半闭环的位置控制,MCU输出补偿脉冲进行角度补偿。(图7)
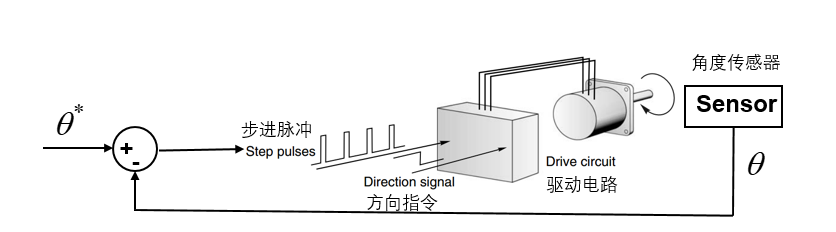
图7 步进电机的位置半闭环控制
角度补偿也可以是更为复杂和难度较高的位置闭环控制。用获得的转子角度信息,对步进电机的A相和B相电流进行空间坐标变换,形成转子位置和dq坐标电流的双闭环控制,就能获得更好的性能。(图8)
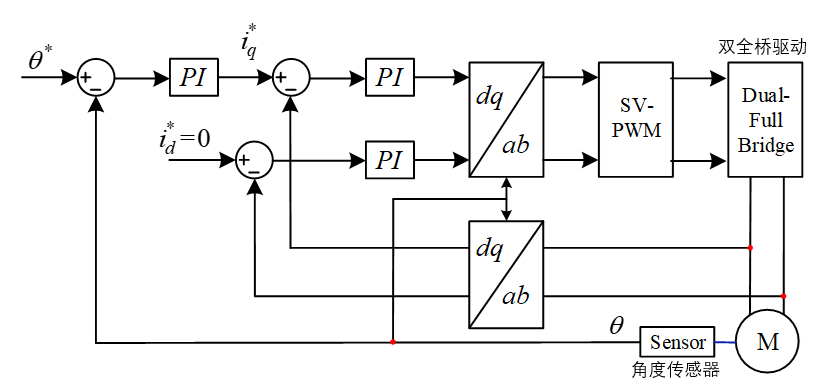
图8 步进电机的位置闭环控制
这里涉及的一些更深入的技术知识大家可以通过文献资料进行学习,本篇文章也只是做一个抛砖引玉。那么除了外功招式,内功心法无感的诊断究竟是什么样子的呢?让我们下一期再见~
查看更多技术资源可访问: Resource Center (monolithicpower.cn)