上回说到,步进电机应对堵转,分别有外功招式和内功心法。外功招式就是有感控制,通过角度传感器来检测转子的位置信息,判断电机是否发生失步或者堵转,然后进行丢失角度的补偿。
那么如果在步进电机系统中去掉角度传感器,步进电机要如何重新解决这一问题呢?这就是我们今天要介绍的内功心法——无感诊断。
相传武林中,当“乾坤大挪移”的内功心法练到一定的境界便可听声辩位,这就需要步进电机对自身更进一步的认识了![]()
点击上图或下方链接可跳转至视频
视频文字部分:
步进电机模型
想必大家还记得校园时期学过的物理知识,左手安培力定则和右手切割磁感线定则。步进电机的通电线圈绕组在安培力的作用下进行旋转运动,同时线圈绕组也在切割定子磁感线,绕组两端将会产生感应的反向电动势,这个感应电动势也称之为反电动势 ,作用在线圈绕组上。
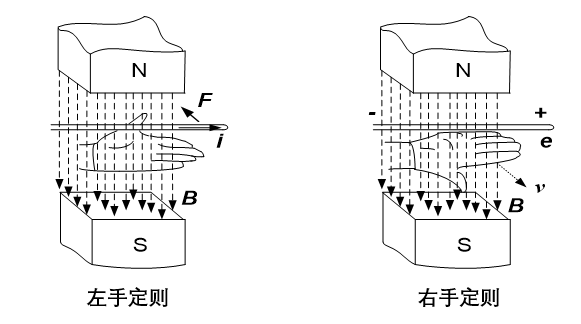
图1 左手定则和右手定则
当输入电压VIN施加在电机两端(图2),结合步进电机绕组的阻抗和电流大小,并考虑A相和B相绕组的对称性,可以将整个回路的电压方程简化为简易的方程式:

其中,VIN为输入电压,I为绕组中的电流,R为绕组阻值,E为反电动势,L为绕组感量。
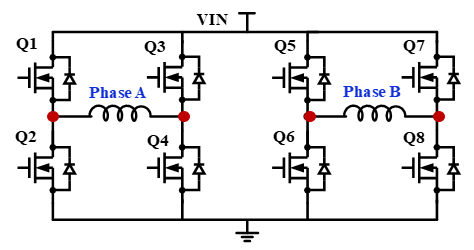
图2 步进电机控制系统简化电路图
反电动势和步进电机的转子极对数,电机的最大磁通还有旋转的角速度相关。反电动势简易方程为:

当一台电机被制造出来后,极对数和最大磁通都会被确定下来,所以电机运行过程中,就只有转速大小影响了反电动势的大小。一旦电机转速为0的时候,反电动势大小也会降为0。
因此可以通过对绕组上反电动势大小的检测来估算步进电机的转速,并且来判断是否有堵转发生。
无感诊断方法一——步进电机的反电动势检测
由于两相步进电机A相合B相的对称性,此处对A相的反电动势检测方法进行详细介绍。
图3是步进电机进行细分控制,空载运行过程中的A相绕组电流和A相两端的反电动势。当负载增加时,反电动势和绕组电流的相位差会减小,重载情况下会接近同相。一旦步进电机出现堵转情况,反电动势将会减小至零。
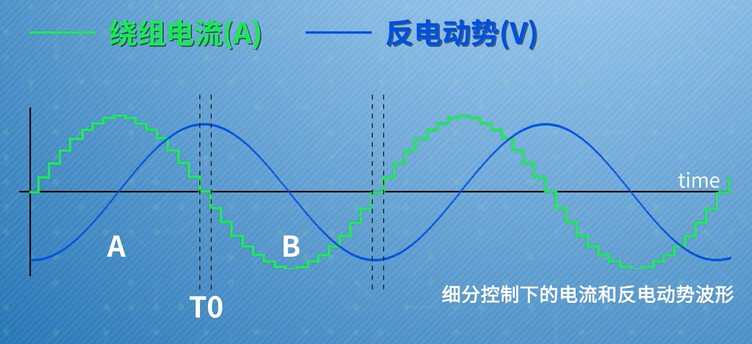
图3 细分控制下的电流和反电动势波形
对于反电动势的检测,只能在绕组电流为零的时候才可以进行检测,也就T0时间段内。因为此时的电机绕组两端是浮在驱动上的。如果选A时间段进行检测,此时电流由Q1通过绕组流向Q4,忽略掉MOS的阻抗,X点的电位约等于VIN。同理,Y点的电位约等于GND。(图4)因此电流不为零的时间段内是无法进行反电动势的检测。
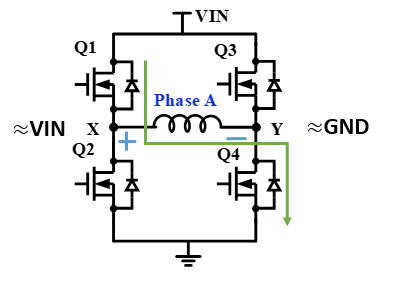
图4 A时间段下,步进电机A相电路图
当然在A时间段内,通过快衰或者慢衰强制将电流减为零后,可以进行反电动势检测,但是这样会使得电流波形畸变,导致输出转矩不稳定,影响正常的工作状态,得不偿失。
在电流为零时,也就是T0时段内,由于无电流回路的影响,全桥处于高阻状态,绕组XY两端检测到就是反电动势大小了。将检测到的反电动势和正常运行转速下的正确反电动势进行多次的对比和诊断,即可判断出电机是否出现了堵转。在更复杂的识别算法下,甚至能够进行失步的判断和补偿。因此,电流为零的时段T0是反电动势检测比较好的时段。
反电动势检测的缺点
- 检测时间段固定,必须要在绕组电流为零才行
- 高细分和高速应用下,电流过零时间段短,需要进行快速检测
- 慢速旋转情况下,反电动势小容易出现误判。
- 重载情况下,A/B相电流和A/B相反电动势同相,也无法做反电动势检测
无感诊断方法二——步进电机的细分控制开关时间检测
① 开关时间Ton时长判断
大家还能回忆起来前面步进电机学习“凌波微步”细分控制 的时候吗?这是步进电机进行固定Toff的细分控制情况下,A相绕组的开关时间,绕组电流和反电动势的波形图。(图5)
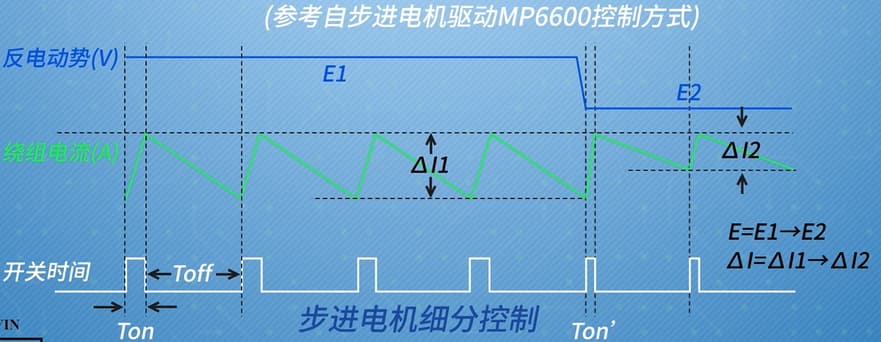
图5 固定Toff的细分控制A相波形
图6和图7分别是Ton和Toff控制状态下,A相绕组的电路图和电流纹波公式。
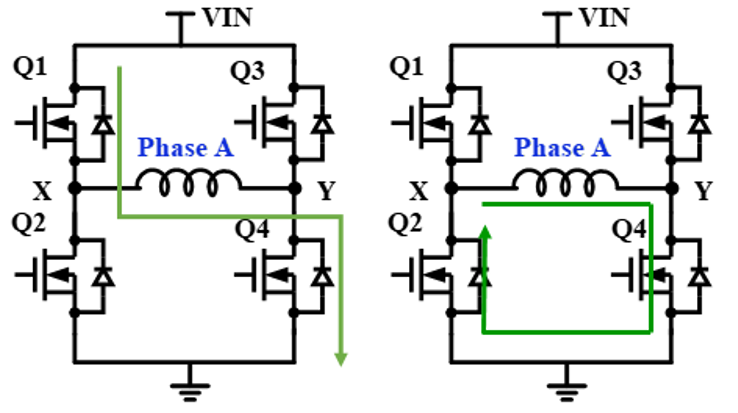
图6 Ton(左)和Toff(右) 时段下,A相绕组电路图
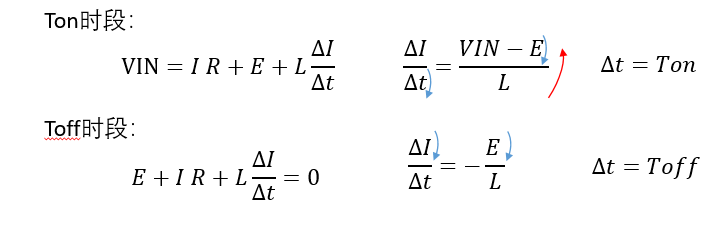
图7 Ton和Toff时段下,A相绕组的电流纹波公式
结合图6和图7,当处于Ton时段下,Q1和Q4开通,如果忽略掉内阻,那么可以认为绕组电流是以VIN-E/L的斜率上升。在Toff时段内,Q1关闭,Q2和Q4开通,绕组电流续流,绕组电流以-E/L电流下降。
当步进电机遇到了堵转的状况,反电动势从E1下降到了E2,此时电流上升速度会瞬间增大。由于控制方式中是固定电流峰值Iset和Toff时间的,所以最终开通时间Ton会相应地减小。在Toff时间段内,由于反电动势E的下降,电流的下降斜率将减小。由于慢衰设置的Toff时间是固定的,所以电流纹波最终会从∆𝐼1减小至∆𝐼2。
牵一发而动全身,相比于反电动势的检测方法,检测开关时间长短的方法所受到的检测时段限制就会小很多,不需要在短暂的过零时间内进行检测。反电动势变化引起电机参数变化,通过检测Ton的时间是否有明显的减小,即可间接地判断出步进电机的运行情况。
但是,影响Ton时间的变量还有输入电压VIN,如果步进电机工作的时候,VIN波动比较大,这也会导致检测的失误。
开关时间 Ton 时长判断优缺点
- 受到的检测时段限制小,但是会受到VIN波动的影响,可能会出现误判。
② 开关时间Toff时长判断
开关时间的检测除了检测Ton,当然也能来检测Toff,但是这就不能采用固定Toff的细分控制,而是要采用固定电流纹波的控制方法。
图8为固定电流纹波的细分控制A相波形,当发生堵转的时候,由于反电动势从E1减小到了E2,所以toff时间段内电流下降变缓。由于采用了固定电流纹波的细分控制,导致了toff时间增加。
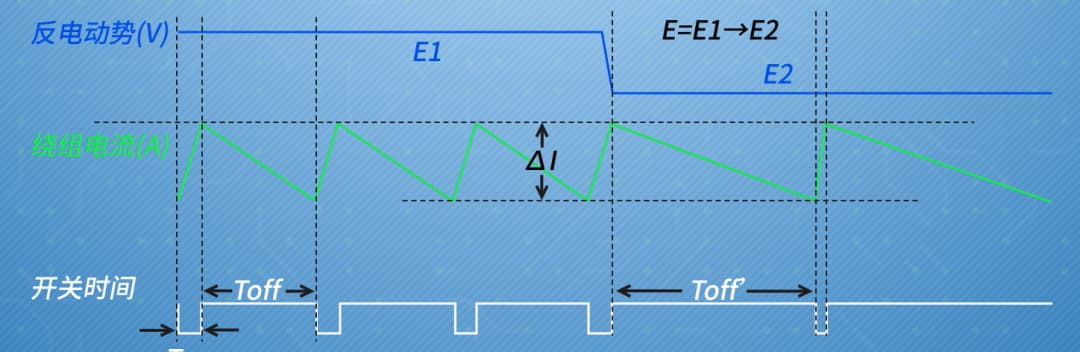
图8 固定电流纹波的细分控制A相波形
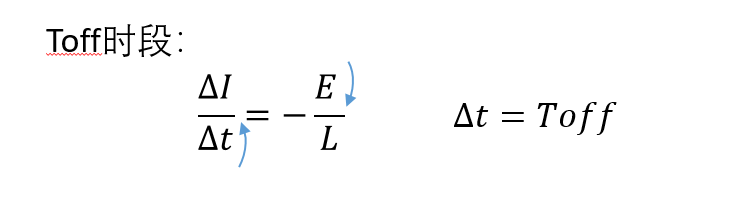
图9 Toff时段下,A相绕组的电流纹波公式
由于Toff时段内,电流斜率只受到了反电动势的影响,所以避免了输入电压VIN波动的影响。检测Toff时间是否变长,即可间接进行步进电机运行状况的判断。
但是固定电流纹波的细分控制额外增加了控制的难度。因此在不同的应用场景和需求下,可以合理地选择检测方法,扬长避短。
检测方法还有很多,招式和功法的变幻也多重多样,步进电机通过这一次的锻炼,更加完善了自身的功力和招式,知道如何来应对堵转和失步,使得系统运行更加的稳定可靠,获得了更多武林同僚的认可。
这次的小课堂就结束了,大家后会有期。
查看更多技术资源可访问: Resource Center (monolithicpower.cn)