之前开源过一个这个小项目, 今天想一次说清楚霍尔和磁角度传感器原理,其实超简单!
你将了解:
- 车速/转速是如何通过“脉冲”算出来的
- 模拟霍尔如何实现精确位置检测(如油门踏板)
- 磁角度传感器如何用三角函数算出角度
- 绝对式 vs 增量式编码器的本质区别
—————————————————————————————————
你有没有好奇,自行车的速度是怎么测量出来的,其实只需要一个几毛钱的霍尔传感器,就能做到。
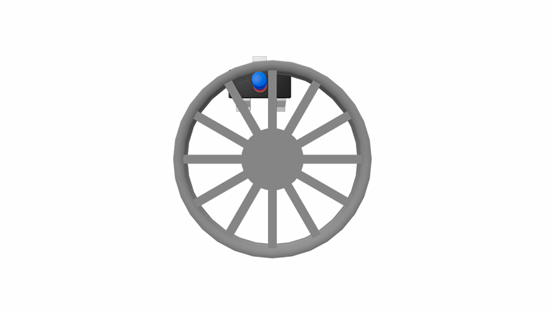
霍尔传感器有一个这样的特性,当磁铁靠近时,它就会输出高电平,离开之后输出低电平。
在自行车轮子上装一块小磁铁,再给他加一个霍尔传感器,轮子每转一圈,磁铁就会经过霍尔传感器一次,传感器就会输出一个脉冲。
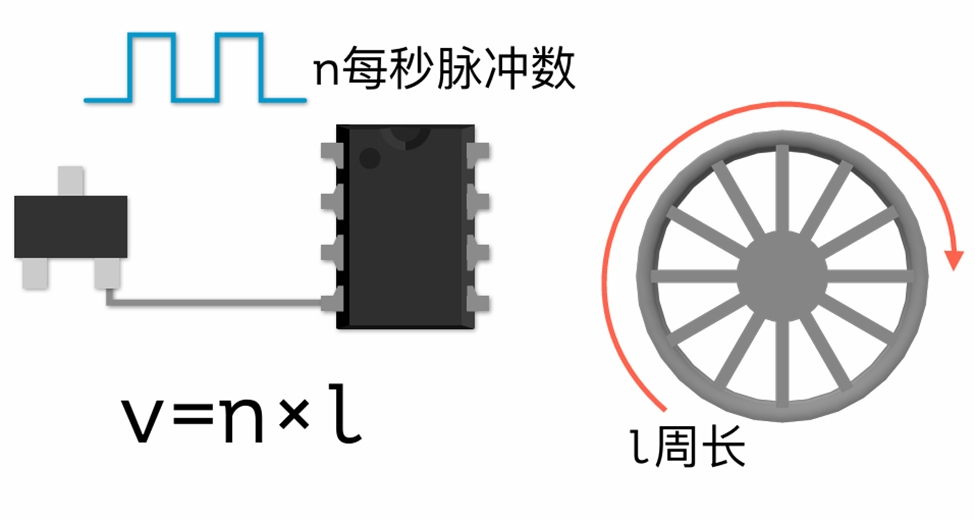
而霍尔传感器是和单片机相连的,统计每秒收到多少个脉冲,再结合轮子周长,就能直接算出车速。
汽车的测速原理基本一样。只要有轮子在转动,就可以用数字霍尔传感器来测量转速
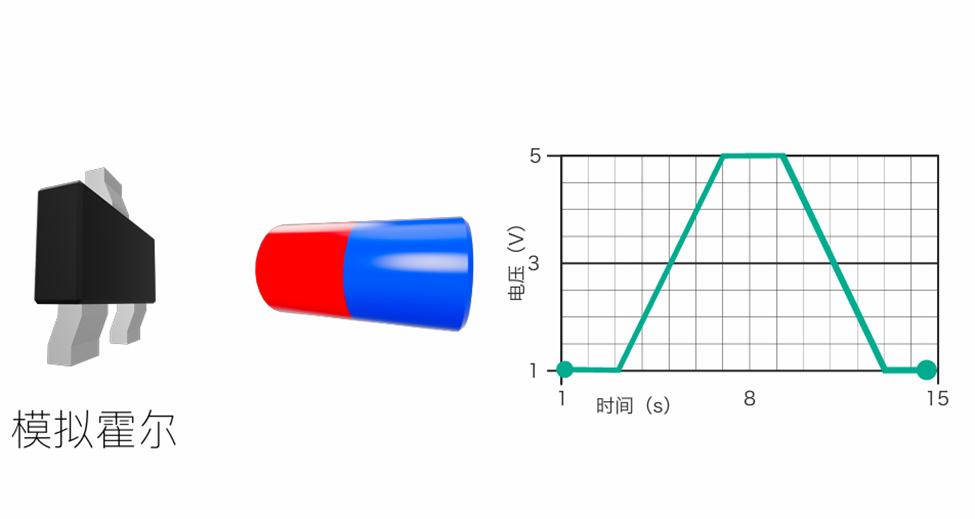
除此之外,还有一种模拟霍尔传感器。单从外观看,它和数字霍尔长的一样,但它的输出不再是简单的高、低电平,而是一个连续变化的电压:磁场越强,输出电压越高;磁场越弱,输出电压越低。
比如汽车的油门踏板,就采用了模拟霍尔传感器。
踩下踏板时,磁场随之变化,霍尔传感器输出的电压也会连续变化。这样,单片机只需要读取这个电压大小,就能判断踏板被踩下了多少。
同时,由于霍尔传感器是非接触式检测,没有机械磨损,因此寿命极长,非常适合对可靠性要求极高的场合。
“霍尔” 其实是一个人的名字,美国物理学家 Edwin Herbert Hall。
1879 年,还是年轻研究员的他,做了一个简单却影响深远的实验:
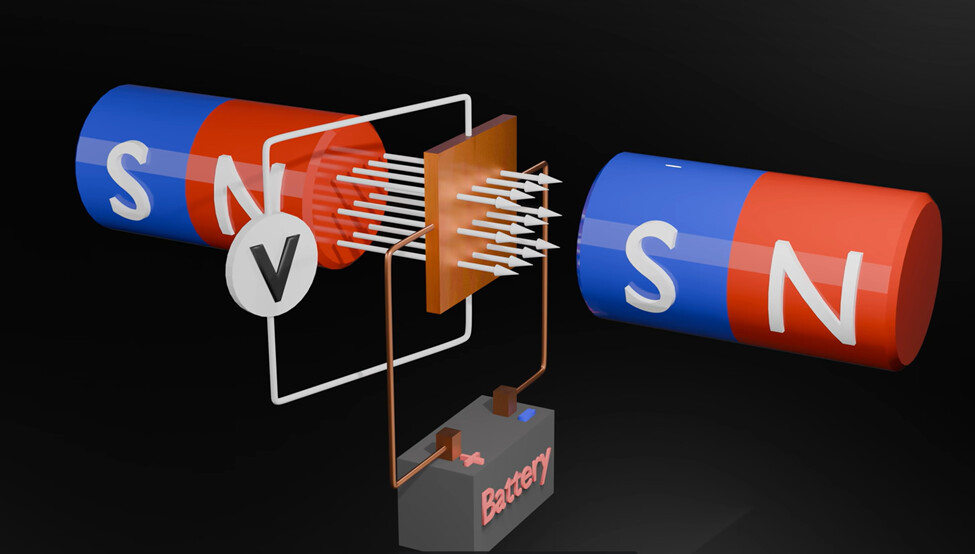
给一片金属通电,并给它施加磁场,结果金属片两侧出现了电压,这就是霍尔电压,对应的现象被称为霍尔效应。
在霍尔效应的基础上,加上放大电路、晶体管并整体封装,就成了我们现在使用的霍尔传感器。
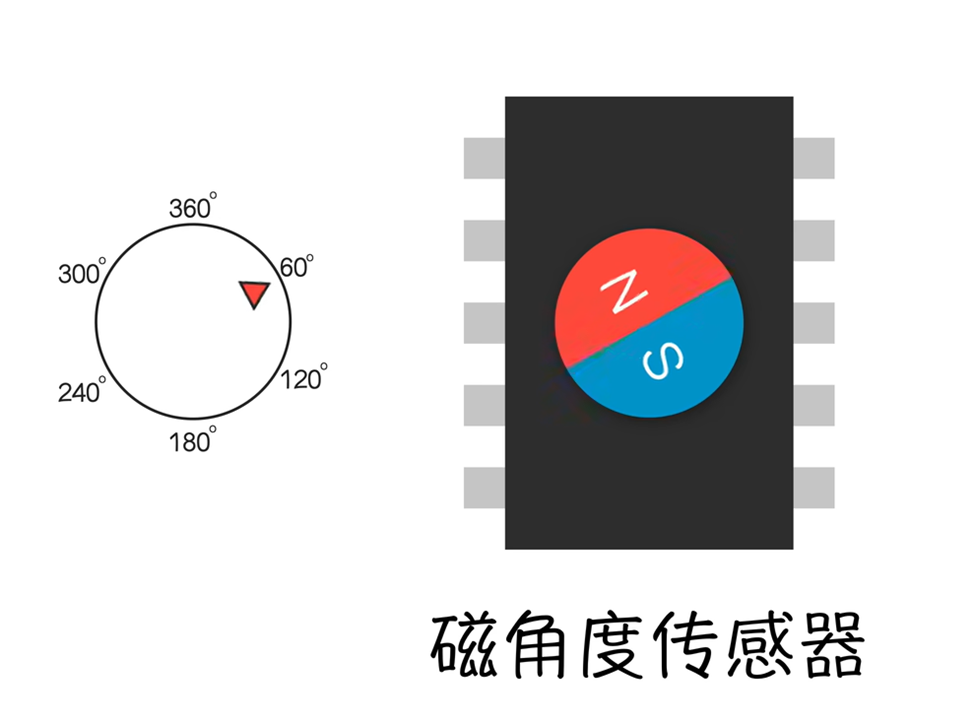
前面说的数字霍尔和模拟霍尔,都不能直接测试转了多少度。
这时候就需要磁角度传感器出场了。它外观和普通芯片差不多,却能精准 “看清” 磁铁的旋转角度。只要在芯片上方放一块小磁铁,无论磁铁转到什么位置,它都能实时测出当前角度。
那它到底是怎么做到的呢?
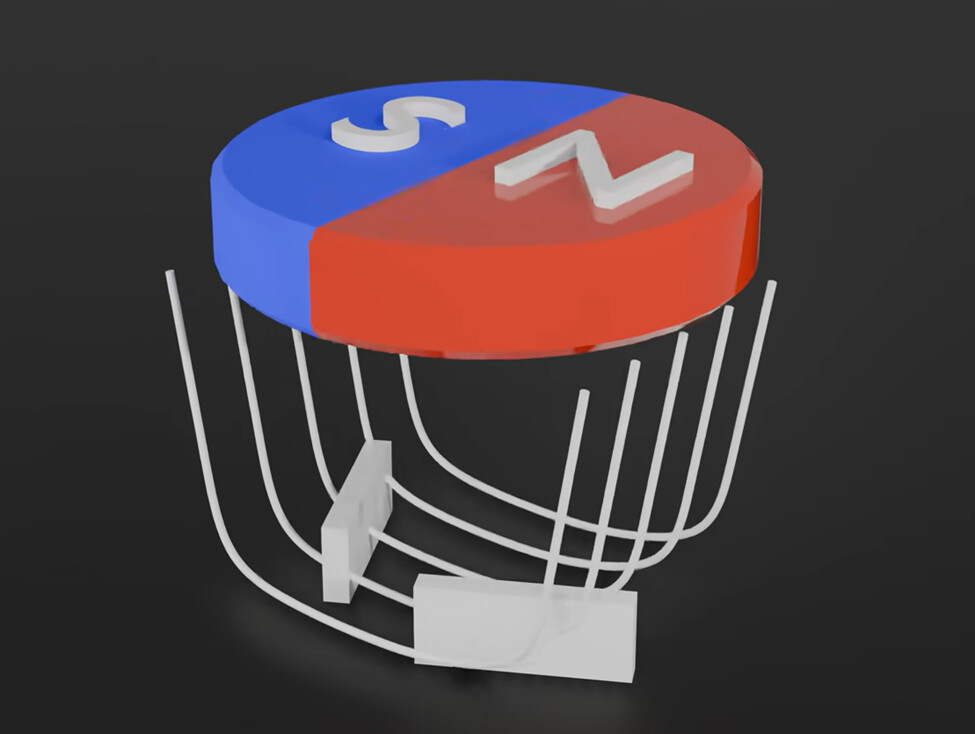
它内部用的其实也是霍尔传感器,但不止一个,至少要两个或者更多。
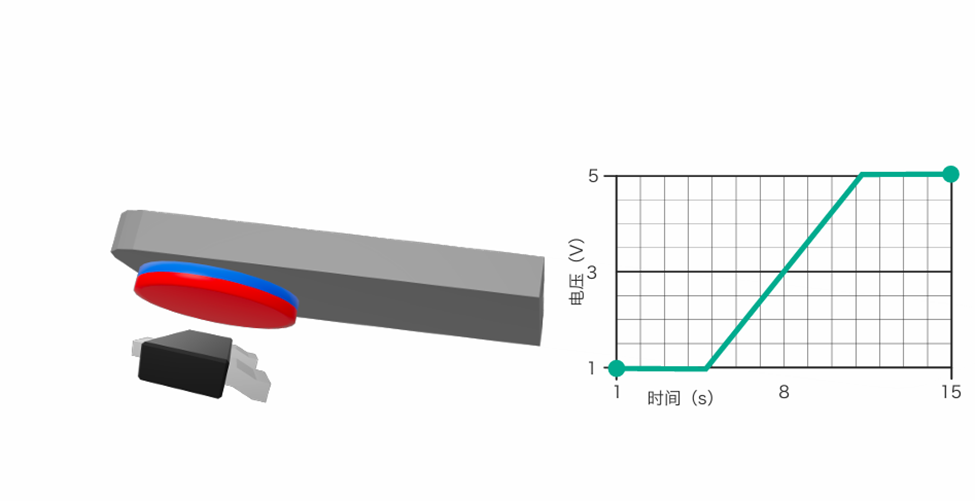
为了便于理解,我们用矩形代替霍尔传感器。它们是垂直于平面摆放的,分别位于X轴和Y轴。
同时必须搭配径向充磁的磁铁,它的磁感线是这样分布的。
当磁铁转动时,穿过两个霍尔元件的磁通量会跟着变化,霍尔电压也随之改变。
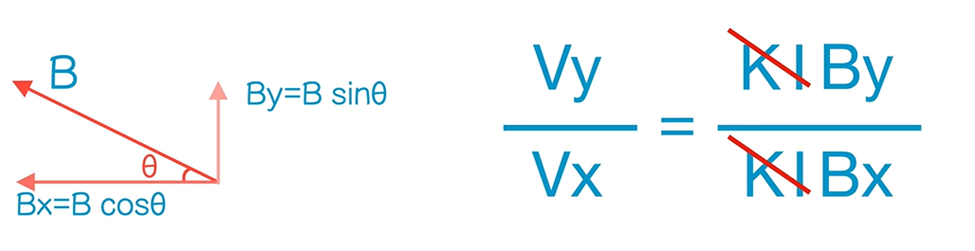
比如当磁铁转过角度 θ 时,X 方向的磁场分量可表示为 Bcosθ,Y 方向的磁场分量为 Bsinθ。
根据霍尔效应,电压和磁感应强度成正比。
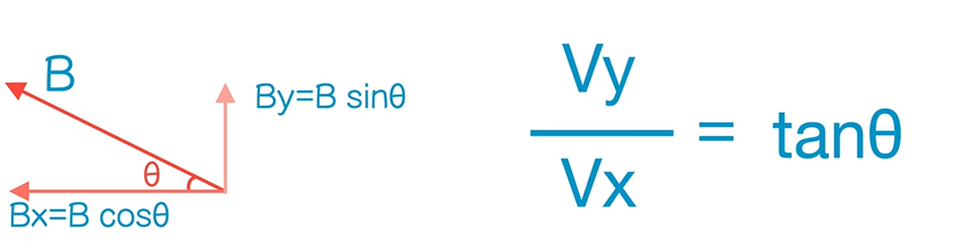
把Vy和Vx两个电压做比,霍尔灵敏度K和电流i都会被消去,而磁感应强度Bx和By都可以用三角函数表示,磁感应强度B也可以消去,此时就只剩下sinθ/cosθ。
根据三角函数sinθ/cosθ=tanθ,此时角度值就只和两个电压有关,而这两个电压都可以被霍尔传感器直接测量,这样就能测得磁铁当下所处的角度。
角度值就是这么算出来的。
如果想要测量的精度更高,就需要更多的霍尔传感器的参与。
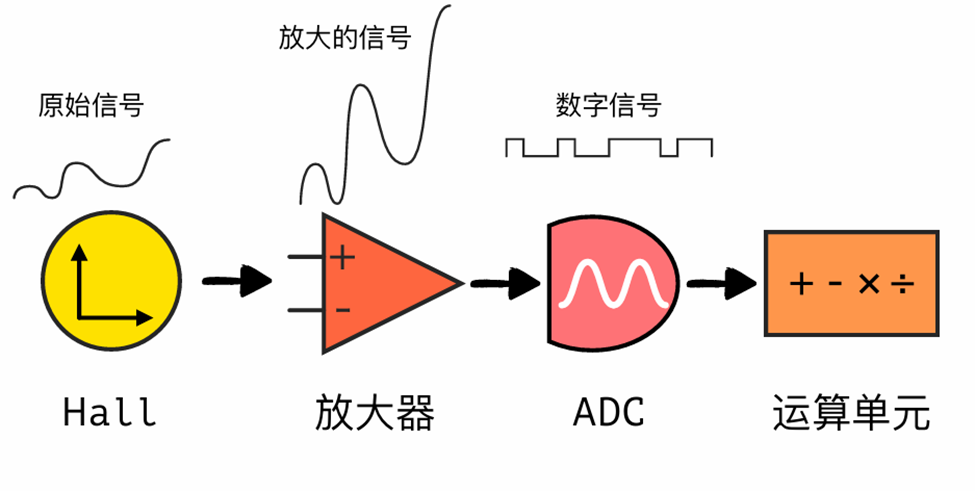
芯片内部不只有霍尔传感器,还集成了放大器、ADC 与运算单元。这样就构成了磁角度传感器。
霍尔电压先经放大器放大,再由 ADC 转为数字量,然后通过运算得到角度,最后以串行二进制数据输出,常见为 12 位或更多。
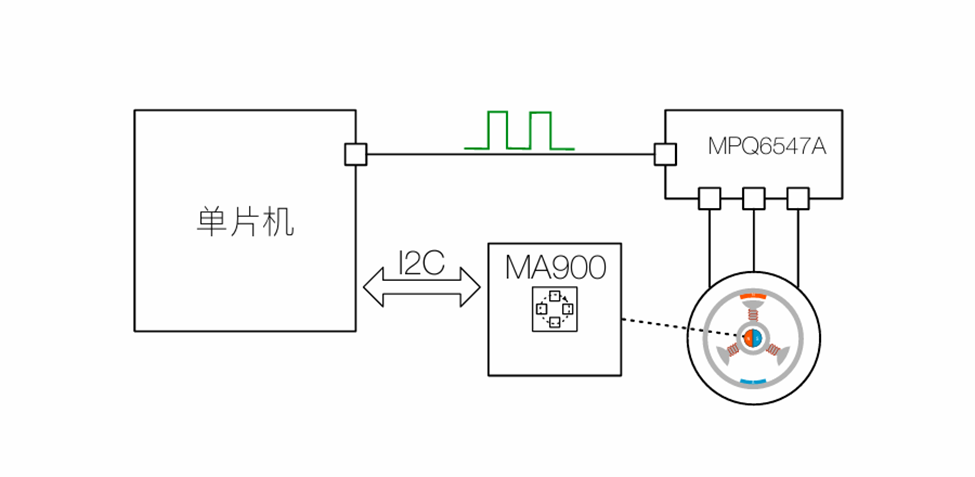
比如我之前用的MA900角度传感器,它是14位的,相当于把360度分成了16384份。每一份就是0.02度,也就是它的测量分辨率是0.02度。
以上所说的是绝对式磁角度传感器(或编码器),磁铁每转到一个角度,芯片就会输出当前角度的值,即使断电之后,只要磁铁的位置不变,它就会一直输出这个角度值。
除此之外还有一种增量式磁角度传感器,它输出的是一个个的脉冲,比如它每转一度输出一个脉冲,那么它如果输出了30个脉冲,就说明它转过了30度。但如果设备断电,就无法知道当前的位置了。
它的底层检测原理和绝对式磁角度传感器差不多,区别主要在芯片内部的数字信号处理和编码方式,绝对式的一次输出十几个二进制0和1,代表当前的绝对角度,而增量式的输出的是脉冲,每转过一定的度数输出一个脉冲。
好了这就是我对磁角度传感器的简单解读,希望对你理解有帮助!