大赛聚焦机器人模块设计,鼓励参赛者立足真实应用场景,围绕运动控制、电池、电源等关键技术方向,借助 AI 高效完成从方案构思、模块设计到实物验证的完整创作流程。无论你是初入赛场的探索者,还是经验丰富的实践者,都能在大赛中锻造硬实力,让想法照进现实。欢迎报名MPS 机器人模块设计大赛,以模块之力,驱动未来!
▍大赛日程
▍提交创意,报名大赛
■ 提交创意时间: 即日起——2026年4月30日
■ 提交方式 (完成第2步和第3步才视为报名成功)
第1步:浏览下方【大赛必用物料】,选择至少1种【大赛必用物料】,作为参赛物料。
第2步:在本帖下方跟帖提交【创意名称、所选物料型号及数量】,二者缺一不可。
第3步:提交>>大赛物料申请表 ,以便邮寄大赛物料。
报名结束后,我们将评选出15位创意优秀的小伙伴入围。
■ 创意说明
项目描述明确,且基于所选物料切实可行,越详细越好。
大赛物料分为大赛必用物料和个人自备物料。大赛必用物料将由MPS邮寄,个人自备物料指入围者自备物料,
每人最多可提交2个创意参与入围评选。
▍作品提交
■ 提交作品时间 :2026年5月18日—7月31日
■ 提交方式 :进入>>MPS技术论坛 — 运动控制感应和机器人技术板块 ,以“【2026 机器人模块大赛】+创意名称+分享内容”为主题发新帖即可。
■ 内容分享 :大赛期间,在>>MPS技术论坛 — 运动控制感应和机器人技术板块 ,按大赛项目内容及时发帖与网友互动,就本人及其它参赛作品,积极参与技术讨论,并发表具有建设性的积极言论者(如解决问题等),将酌情予以加分。分享的内容中合理使用AI工具完成作品设计,也将酌情予以加分 。
■ 提交要求
作品须包含以下内容
• 设计名称、作品照片、作品简介、物料清单、系统框图、各部分功能的实现说明和解析、源码及说明等;
• 证明作品能完成既定工作或功能的演示视频;
• 其他相关资料和说明等。
提交形式:作品以在>> MPS技术论坛 — 运动控制感应和机器人技术板块 ,以发帖形式提交作品。
■ 作品提交注意事项及评奖细则
作品须原创且首发于MPS,并且必须切实用到大赛邮寄的全部必用物料;
评选标准细则,详见《2026 MPS机器人模块设计大赛参赛说明及评奖细则》.pdf (247.1 KB);
收到物料1个月内未分享进度者,请将物料寄回MPS,邮费参与者自理;
作品帖和分享帖所用素材说明为避免产生版权纠纷,作品帖和分享帖中(含演示视频)文字、图片、声音等素材的做如下说明:
(1)文字(如文案、字幕等)及自制图片字体,务必使用思源黑体,以防字体侵权产生赔偿;
(2)请使用自拍等原创图片和声音,如果使用非原创。
参与活动即默认将分享内容授权许可MPS、EEWorld使用、复制、修改、汇编、发布和传播文章内容;参与活动即默认同意本活动隐私声明,MPS、EEWorld有权了解、使用用户相关信息。
▍大赛奖励
成功完赛奖:为鼓励全程参与,所有完成项目设计且未获得上述奖项的参与者均可获 ¥200。
▍畅聊赢好礼
MPS机器人模块设计大赛火热进行过程中,创意作品持续更新,欢迎小伙伴们就创意和作品实时分享精彩观点,对每一份设计畅所欲言,分享看法、交流思路、提出建议。让灵感在讨论中碰撞,让创意在完善中生长,一起见证硬实力是怎样锻造的,想法是怎样照进现实的。回帖畅聊还赢**【防潮垫、电力监测仪、多功能钳、京东卡】**等好礼。
■ 回帖时间 :2026年5月18日—8月31日
■ 参与方式 :点击下方“ 我要回帖 ”按钮,进入>>MPS技术论坛 — 运动控制感应和机器人技术板块 ,在>>[【大赛入围帖】或主题中带有“【2026机器人模块大赛】”的帖子下回帖即可。活动结束后,我们将评选出30位优秀回帖的小伙伴送出好礼。
■ 热血围观奖
yaof
2026 年3 月 25 日 04:06
14
自动循迹移动机器人平台
【说明】
构建一个可移动的轮式驱动平台,在机器视觉的驱动下,自动移动。自动移动使用树莓派4B作为主控,连接摄像头,自动识别路径,按照路线移动,并能识别人类的出现,自动避让或者停止。其中动力子板,采用MP2797控制7x3.7V的18650电池作为控制平台的电池动力。电机控制采用MP6540H控制一个24V三相无刷电机BLDC作为主驱动力,MP1918驱动NMOS管控制向轮方向控制,MCS1805采集回路电流进行保护反馈,主控板采用MP4583产生3.3V电压给树莓派4B,并连接MA600A跟踪转向轮的转角,进行方向反馈控制。软件系统采用ubuntu22.04及openVINO框架实现上述AI控制。
【物料】
5个MP2797DFP-0000,5个MP6540HGU, 5个MP1918GQE, 5个MP4583GQVE,5个MCS1805GS-350-B, 5个MA600AGQE-0000
1 个赞
微型高精度机器人单关节闭环驱动模块
面向小型机器人关节驱动场景,设计一款高集成、高精度的单关节闭环驱动模块。
以 MPS 电源、驱动、传感芯片为核心,构建完整的无刷电机伺服控制单元,实现位置闭环、速度闭环与可靠驱动保护,可直接应用于小型机械臂、云台、灵巧手等关节执行机构,具备体积小、性能稳定、扩展性强的特点。
电源单元
采用 MP4583 实现 12–48V 宽电压输入,为后级驱动电路与主控系统提供稳定低压供电,效率高、纹波小,满足机器人移动平台与模块化供电需求。
驱动单元
以 MP6540H 三相集成驱动芯片为核心,内置功率桥与电流采样电路,简化外围硬件设计,支持 FOC 矢量控制,实现电机平稳运行与精准力矩输出。
传感与闭环控制
使用 MA600A 磁角度传感器实时采集电机转子角度,实现高精度位置反馈,构成速度环 + 位置环双闭环控制系统,提升关节定位精度与低速运行平稳性。
主控与保护
以通用 MCU 实现算法调度与逻辑控制,集成过流、过压、堵转等硬件保护机制,保证模块在复杂工况下稳定可靠运行。
MP6540H ×5
MA600A ×5
MP4583 ×5
1 个赞
**创意名称:**移动机器人高精度电池管理系统
**参赛物料:**MP2797
**创意设计:**本作品基于 MPS MP2797 高精度电池监控芯片,设计 10 串智能锂电池 BMS 管理系统。芯片内置双 ADC 同步采集 10 串电芯电压、总压、充放电电流与温度,集成库仑计实现 SOC 精准估算,支持被动均衡功能,同时具备过压、欠压、过流、短路、超温、低温全硬件保护。系统通过 I2C 与主控通信,搭配淘晶驰显示屏实时显示电池状态,并实时发送信息至云平台,具备高精度、高可靠性、智能化特点,可广泛应用于机器人电源、便携储能、轻型电动车等场景,为锂电池安全提供完整解决方案。
DIY 创意:
申请的样片型号:
XXYY
2026 年4 月 10 日 02:28
19
【创意名称与设计】机器人关节高精度闭环驱动模块
本项目准备做一个面向机器人单关节应用的高精度闭环驱动模块,主要用于机械臂关节、小型执行机构等场景。
方案上,MP6540H 用来做三相电机驱动,MA600A 用来做角度检测反馈,MCS1805 用来做电流检测,MP4583 负责系统供电。整体实现电机驱动、位置反馈、电流监测和电源管理等功能,构成一个完整的关节驱动小模块。
后续计划完成硬件电路设计、驱动控制调试以及基本闭环控制验证,重点测试电机启停、正反转、角度跟踪和运行稳定性。希望最终做出一个结构清晰、功能完整、方便扩展的机器人关节驱动方案。
【所选物料】
创意名称
桌面 AI 家教机器人(动作示范 + 姿势纠正 + AI 讲题)
项目简介
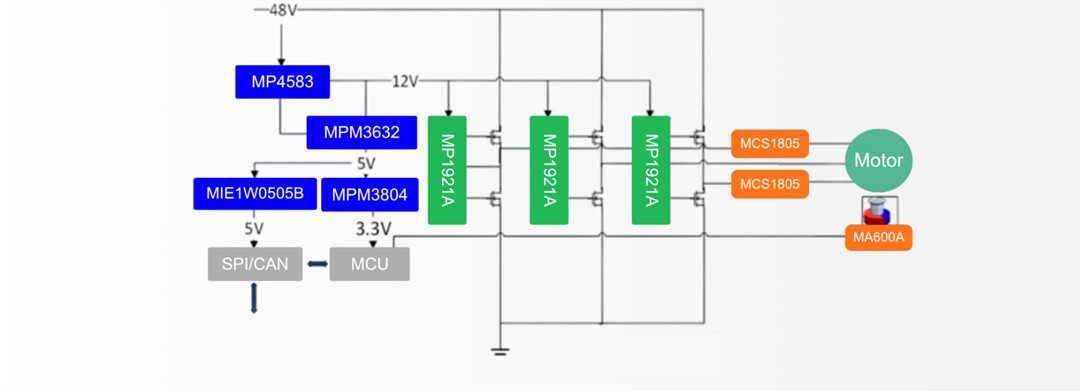
面向青少年学习辅导场景,打造一款桌面级、拟人化、多模态交互的 AI 家教机器人。集成头部视觉、躯干、多关节手臂、灵巧手执行机构,实现动作示范、姿势纠正、题目讲解、情绪陪伴四大核心功能。以 MPS 电源、驱动、传感芯片为核心,构建高可靠、低噪声、高精度机器人运动与供电系统,可用于家庭、教室、托管班等场景,体积小巧、功能完整、扩展性强。
系统方案
电源单元
采用 MP4583 实现 12–24V 宽电压输入,为机器人主控、关节驱动、视觉与音频系统提供稳定低压供电,效率高、纹波小,满足桌面长时间安全运行。
驱动单元
以 MP6540H 三相集成驱动芯片为核心,内置功率桥与电流采样,外围简洁,支持精准电机控制,驱动多关节手臂与灵巧手平稳运动,适合人机交互场景。
传感与闭环控制
使用 MA600A 高精度磁角度传感器,实时采集关节转子位置,构成位置环 + 速度环双闭环,保证机械臂动作精准、运行平稳,可高质量完成动作示范与姿势纠正。
头部系统
搭载高清摄像头实现题目识别、坐姿 / 握笔姿态检测、动作捕捉;集成麦克风与扬声器,完成语音交互、AI 讲题、情绪鼓励。
躯干系统
集成主控 MCU、电源管理、通信模块,负责机器人整体调度、多模块协同,结构紧凑、安全可靠。
关节与灵巧手系统
采用多关节机械臂结构,实现写字、画图、指题、示范动作;末端小型夹持机械手模拟人手完成握笔、指读、翻页等精细操作,配合闭环驱动实现安全人机交互。
选用物料
MP4583 ×1
MP6540H ×1
MA600A ×1
创意名称:力反馈旋钮的实现
参赛物料:MP6540H/MA600A/MA730 芯片各10pcs
创意设计:力反馈旋钮 ,通过电机主动输出扭矩,配合高精度位置检测,在用户旋转时模拟出各种物理手感(卡位、阻力、限位、回弹等) 。磁编码器 实时读取旋转角度、速度、方向;
编码器测位置 → MCU 算扭矩 → FOC 驱动电机反向施力 → 模拟出各种可编辑的物理手感。
DIY 创意:
申请的样片型号 *:
创意名称:基于MPS芯片的智能测试电源模块
参赛物料及数量:MPM54304×2
项目背景:
本项目源于日常电路板测试工作的实际痛点,针对产线电路板测试中多电压需求、调压不便、监控盲区三大痛点,设计一款基于MPS芯片的高精度可编程电源模块。实现电压程控调节和实时监控,用一个小巧的模块替代多台传统电源,提升产线测试效率。
项目思路及内容:
MPM54304是四通道输出的降压电源模块,集成度高、体积小,,适合做多路电压输出的电源模块。因日常工作需要给不同的电路板供电去测试,它能同时提供3A/3A/2A/2A四路输出,通道1和2还可以并联成6A的大电流通道,满足日常测试需求。
1. 高集成度电源管理:以MPM54304为核心,给其提供12V直流电,会产生电路板所需的多种电压,如5V、3.3V、1.8V等。
2. 智能可编程与实时监控:利用MPM54304自带的I2C总线接口,连接一个 STM32或Arduino主控芯片。通过编写简单的程序,主控芯片可以向MPM54304发送“指令”,实现输出电压的动态调节、输出电流的实时读取。
3. 智能监控与交互:通过0.96英寸的OLED屏幕和三个按键,实现电压调节和状态显示。
机器人双电池热插拔控制演示板
说明:
现在机器人的续航问题一直是困扰行业发展和落地的一个大问题,高能量密度电池技术,快速补能,在线不停机换电是现有的几个可选项;
物料:
MP4201 5PCS,
MPM3826C 5PCS,
MPM3826C 5PCS